 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTORL-VLA: Tactile Guided Online Reinforcement Learning for Contact-Rich Manipulation
Jun 08, 2026Vision-Language-Action (VLA) models have become a powerful framework for robotic manipulation, and recent studies have introduced tactile or force feedback into VLAs to address contact-rich tasks. However, these models are typically deployed as offline policies. When contact conditions shift from the training distribution, the policy cannot perform online adaptation, leading to problems such as inappropriate contact forces and inefficient retries. Therefore, we propose TORL-VLA, a tactile-guided online reinforcement learning framework that couples tactile feedback with policy refinement for contact-rich manipulation. Our method introduces a tactile-derived wrench-aware VLA to predict reference actions and future wrench sequences, while a lightweight online RL module is used to refine the reference actions. To stabilize learning from mixed exploratory policy-generated and human-intervention data, we introduce an intervention-censored critic that prevents post-intervention success from being wrongly credited to policy-generated actions preceding intervention. Real-robot experiments on long-horizon contact-rich tasks, including latch manipulation, coffee-cup placement, and egg handling, show that TORL-VLA improves success rates at both subtask and full-task levels, as well as time-bounded execution efficiency over strong baselines.
TouchAnything: A Dataset and Framework for Bimanual Tactile Estimation from Egocentric Video
May 13, 2026Egocentric human video data, which captures rich human-environment interactions and can be collected at scale, has become a key driver of embodied intelligence research. However, existing egocentric datasets typically lack tactile sensing, a critical modality that provides direct cues about contact, force, and pressure in human-object interaction. Without such signals, models struggle to learn physically grounded representations of real-world interaction dynamics. While tactile sensors provide these cues, deploying high-quality tactile hardware at scale remains expensive and cumbersome. This raises a central question: can tactile feedback be inferred directly from visual observations, enabling scalable tactile supervision for egocentric video data and supporting physically grounded embodied learning? To enable research in this direction, we introduce EgoTouch, a large-scale multi-view egocentric dataset with dense tactile supervision for bimanual hand-object interaction. EgoTouch comprises 208 manipulation tasks spanning 1,891 episodes in diverse indoor and outdoor environments, with synchronized multi-view RGB (head-mounted egocentric and dual wrist-mounted cameras), bimanual 3D hand pose, and continuous pressure maps from wearable tactile sensors. Building on EgoTouch, we introduce TouchAnything, a baseline multi-view vision-to-touch prediction framework that uses the egocentric view as the primary input and flexibly leverages available wrist-mounted views at inference time. Experiments show that incorporating wrist-mounted views generally improves tactile prediction over egocentric-only input, achieving up to 5.0% relative improvement in Contact IoU and 6.1% relative improvement in Volumetric IoU. We will publicly release the dataset, code, and benchmark.
Consistent and Efficient MSCKF-based LiDAR-Inertial Odometry with Inferred Cluster-to-Plane Constraints for UAVs
Mar 13, 2026Robust and accurate navigation is critical for Unmanned Aerial Vehicles (UAVs) especially for those with stringent Size, Weight, and Power (SWaP) constraints. However, most state-of-the-art (SOTA) LiDAR-Inertial Odometry (LIO) systems still suffer from estimation inconsistency and computational bottlenecks when deployed on such platforms. To address these issues, this paper proposes a consistent and efficient tightly-coupled LIO framework tailored for UAVs. Within the efficient Multi-State Constraint Kalman Filter (MSCKF) framework, we build coplanar constraints inferred from planar features observed across a sliding window. By applying null-space projection to sliding-window coplanar constraints, we eliminate the direct dependency on feature parameters in the state vector, thereby mitigating overconfidence and improving consistency. More importantly, to further boost the efficiency, we introduce a parallel voxel-based data association and a novel compact cluster-to-plane measurement model. This compact measurement model losslessly reduces observation dimensionality and significantly accelerating the update process. Extensive evaluations demonstrate that our method outperforms most state-of-the-art (SOTA) approaches by providing a superior balance of consistency and efficiency. It exhibits improved robustness in degenerate scenarios, achieves the lowest memory usage via its map-free nature, and runs in real-time on resource-constrained embedded platforms (e.g., NVIDIA Jetson TX2).
Large-Scale Gaussian Splatting SLAM
May 15, 2025The recently developed Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have shown encouraging and impressive results for visual SLAM. However, most representative methods require RGBD sensors and are only available for indoor environments. The robustness of reconstruction in large-scale outdoor scenarios remains unexplored. This paper introduces a large-scale 3DGS-based visual SLAM with stereo cameras, termed LSG-SLAM. The proposed LSG-SLAM employs a multi-modality strategy to estimate prior poses under large view changes. In tracking, we introduce feature-alignment warping constraints to alleviate the adverse effects of appearance similarity in rendering losses. For the scalability of large-scale scenarios, we introduce continuous Gaussian Splatting submaps to tackle unbounded scenes with limited memory. Loops are detected between GS submaps by place recognition and the relative pose between looped keyframes is optimized utilizing rendering and feature warping losses. After the global optimization of camera poses and Gaussian points, a structure refinement module enhances the reconstruction quality. With extensive evaluations on the EuRoc and KITTI datasets, LSG-SLAM achieves superior performance over existing Neural, 3DGS-based, and even traditional approaches. Project page: https://lsg-slam.github.io.
Robust 4D Radar-aided Inertial Navigation for Aerial Vehicles
Feb 21, 2025



While LiDAR and cameras are becoming ubiquitous for unmanned aerial vehicles (UAVs) but can be ineffective in challenging environments, 4D millimeter-wave (MMW) radars that can provide robust 3D ranging and Doppler velocity measurements are less exploited for aerial navigation. In this paper, we develop an efficient and robust error-state Kalman filter (ESKF)-based radar-inertial navigation for UAVs. The key idea of the proposed approach is the point-to-distribution radar scan matching to provide motion constraints with proper uncertainty qualification, which are used to update the navigation states in a tightly coupled manner, along with the Doppler velocity measurements. Moreover, we propose a robust keyframe-based matching scheme against the prior map (if available) to bound the accumulated navigation errors and thus provide a radar-based global localization solution with high accuracy. Extensive real-world experimental validations have demonstrated that the proposed radar-aided inertial navigation outperforms state-of-the-art methods in both accuracy and robustness.
Square-Root Inverse Filter-based GNSS-Visual-Inertial Navigation
May 17, 2024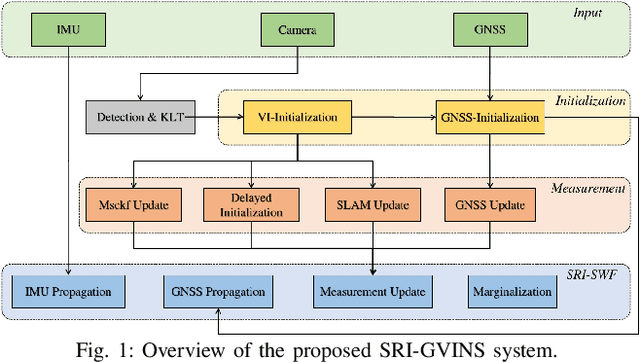



While Global Navigation Satellite System (GNSS) is often used to provide global positioning if available, its intermittency and/or inaccuracy calls for fusion with other sensors. In this paper, we develop a novel GNSS-Visual-Inertial Navigation System (GVINS) that fuses visual, inertial, and raw GNSS measurements within the square-root inverse sliding window filtering (SRI-SWF) framework in a tightly coupled fashion, which thus is termed SRI-GVINS. In particular, for the first time, we deeply fuse the GNSS pseudorange, Doppler shift, single-differenced pseudorange, and double-differenced carrier phase measurements, along with the visual-inertial measurements. Inherited from the SRI-SWF, the proposed SRI-GVINS gains significant numerical stability and computational efficiency over the start-of-the-art methods. Additionally, we propose to use a filter to sequentially initialize the reference frame transformation till converges, rather than collecting measurements for batch optimization. We also perform online calibration of GNSS-IMU extrinsic parameters to mitigate the possible extrinsic parameter degradation. The proposed SRI-GVINS is extensively evaluated on our own collected UAV datasets and the results demonstrate that the proposed method is able to suppress VIO drift in real-time and also show the effectiveness of online GNSS-IMU extrinsic calibration. The experimental validation on the public datasets further reveals that the proposed SRI-GVINS outperforms the state-of-the-art methods in terms of both accuracy and efficiency.
Understanding and Improving Early Stopping for Learning with Noisy Labels
Jun 30, 2021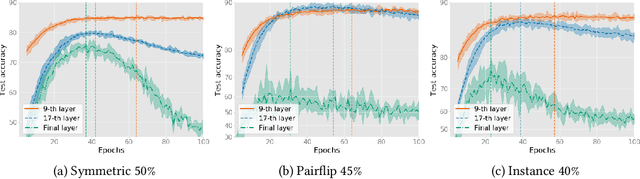

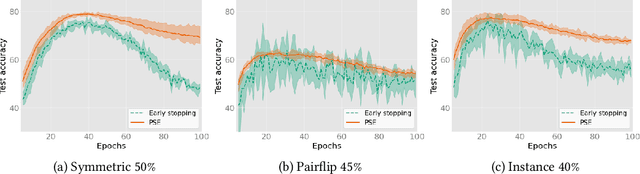

The memorization effect of deep neural network (DNN) plays a pivotal role in many state-of-the-art label-noise learning methods. To exploit this property, the early stopping trick, which stops the optimization at the early stage of training, is usually adopted. Current methods generally decide the early stopping point by considering a DNN as a whole. However, a DNN can be considered as a composition of a series of layers, and we find that the latter layers in a DNN are much more sensitive to label noise, while their former counterparts are quite robust. Therefore, selecting a stopping point for the whole network may make different DNN layers antagonistically affected each other, thus degrading the final performance. In this paper, we propose to separate a DNN into different parts and progressively train them to address this problem. Instead of the early stopping, which trains a whole DNN all at once, we initially train former DNN layers by optimizing the DNN with a relatively large number of epochs. During training, we progressively train the latter DNN layers by using a smaller number of epochs with the preceding layers fixed to counteract the impact of noisy labels. We term the proposed method as progressive early stopping (PES). Despite its simplicity, compared with the early stopping, PES can help to obtain more promising and stable results. Furthermore, by combining PES with existing approaches on noisy label training, we achieve state-of-the-art performance on image classification benchmarks.
Extended T: Learning with Mixed Closed-set and Open-set Noisy Labels
Dec 02, 2020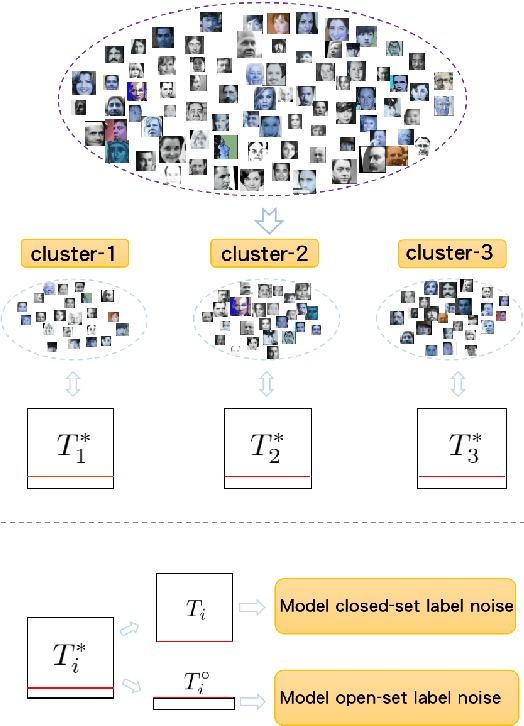
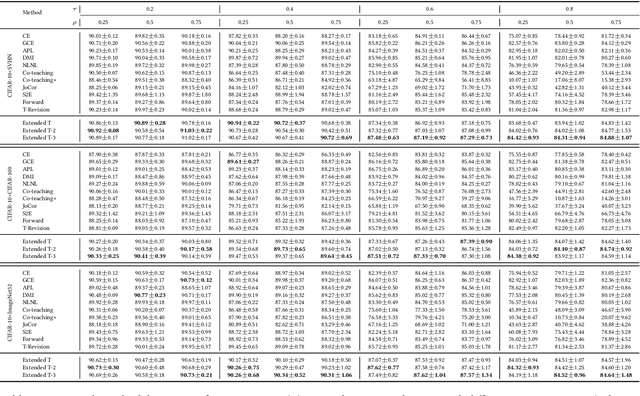
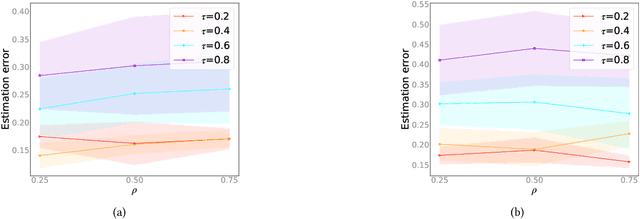
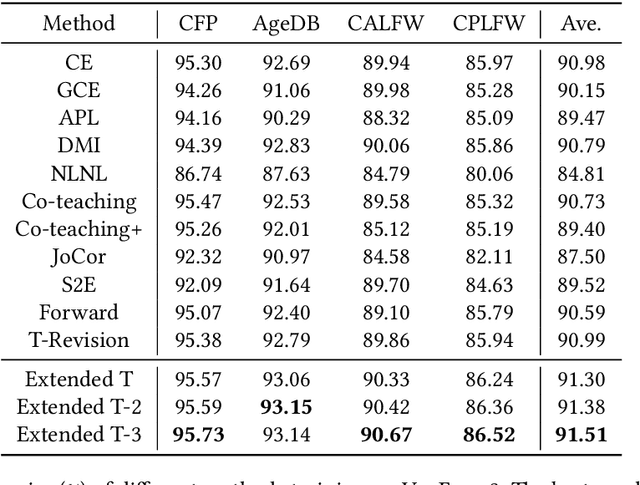
The label noise transition matrix $T$, reflecting the probabilities that true labels flip into noisy ones, is of vital importance to model label noise and design statistically consistent classifiers. The traditional transition matrix is limited to model closed-set label noise, where noisy training data has true class labels within the noisy label set. It is unfitted to employ such a transition matrix to model open-set label noise, where some true class labels are outside the noisy label set. Thus when considering a more realistic situation, i.e., both closed-set and open-set label noise occurs, existing methods will undesirably give biased solutions. Besides, the traditional transition matrix is limited to model instance-independent label noise, which may not perform well in practice. In this paper, we focus on learning under the mixed closed-set and open-set label noise. We address the aforementioned issues by extending the traditional transition matrix to be able to model mixed label noise, and further to the cluster-dependent transition matrix to better approximate the instance-dependent label noise in real-world applications. We term the proposed transition matrix as the cluster-dependent extended transition matrix. An unbiased estimator (i.e., extended $T$-estimator) has been designed to estimate the cluster-dependent extended transition matrix by only exploiting the noisy data. Comprehensive synthetic and real experiments validate that our method can better model the mixed label noise, following its more robust performance than the prior state-of-the-art label-noise learning methods.