 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Gaussian Splatting SLAM
May 15, 2025The recently developed Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have shown encouraging and impressive results for visual SLAM. However, most representative methods require RGBD sensors and are only available for indoor environments. The robustness of reconstruction in large-scale outdoor scenarios remains unexplored. This paper introduces a large-scale 3DGS-based visual SLAM with stereo cameras, termed LSG-SLAM. The proposed LSG-SLAM employs a multi-modality strategy to estimate prior poses under large view changes. In tracking, we introduce feature-alignment warping constraints to alleviate the adverse effects of appearance similarity in rendering losses. For the scalability of large-scale scenarios, we introduce continuous Gaussian Splatting submaps to tackle unbounded scenes with limited memory. Loops are detected between GS submaps by place recognition and the relative pose between looped keyframes is optimized utilizing rendering and feature warping losses. After the global optimization of camera poses and Gaussian points, a structure refinement module enhances the reconstruction quality. With extensive evaluations on the EuRoc and KITTI datasets, LSG-SLAM achieves superior performance over existing Neural, 3DGS-based, and even traditional approaches. Project page: https://lsg-slam.github.io.
HERO-SLAM: Hybrid Enhanced Robust Optimization of Neural SLAM
Jul 26, 2024Simultaneous Localization and Mapping (SLAM) is a fundamental task in robotics, driving numerous applications such as autonomous driving and virtual reality. Recent progress on neural implicit SLAM has shown encouraging and impressive results. However, the robustness of neural SLAM, particularly in challenging or data-limited situations, remains an unresolved issue. This paper presents HERO-SLAM, a Hybrid Enhanced Robust Optimization method for neural SLAM, which combines the benefits of neural implicit field and feature-metric optimization. This hybrid method optimizes a multi-resolution implicit field and enhances robustness in challenging environments with sudden viewpoint changes or sparse data collection. Our comprehensive experimental results on benchmarking datasets validate the effectiveness of our hybrid approach, demonstrating its superior performance over existing implicit field-based methods in challenging scenarios. HERO-SLAM provides a new pathway to enhance the stability, performance, and applicability of neural SLAM in real-world scenarios. Code is available on the project page: https://hero-slam.github.io.
Localizing Discriminative Visual Landmarks for Place Recognition
Apr 14, 2019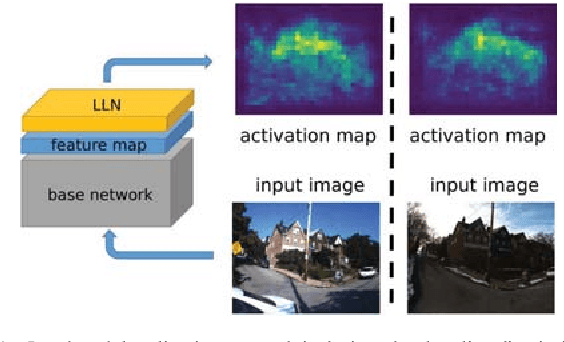
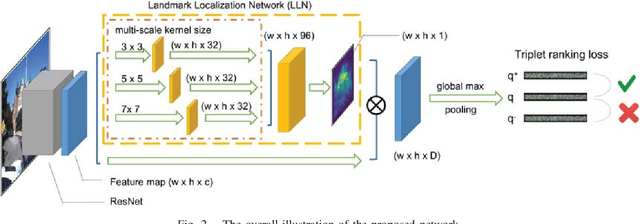
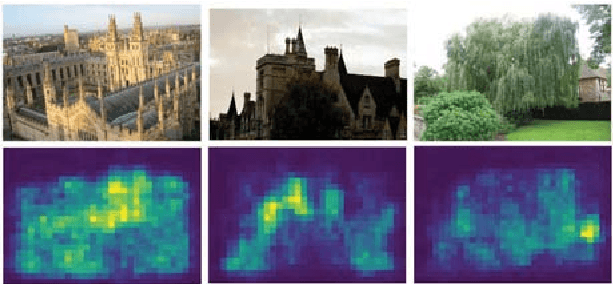

We address the problem of visual place recognition with perceptual changes. The fundamental problem of visual place recognition is generating robust image representations which are not only insensitive to environmental changes but also distinguishable to different places. Taking advantage of the feature extraction ability of Convolutional Neural Networks (CNNs), we further investigate how to localize discriminative visual landmarks that positively contribute to the similarity measurement, such as buildings and vegetations. In particular, a Landmark Localization Network (LLN) is designed to indicate which regions of an image are used for discrimination. Detailed experiments are conducted on open source datasets with varied appearance and viewpoint changes. The proposed approach achieves superior performance against state-of-the-art methods.