 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
2nd Place Solution for Waymo Open Dataset Challenge -- Real-time 2D Object Detection
Jun 16, 2021
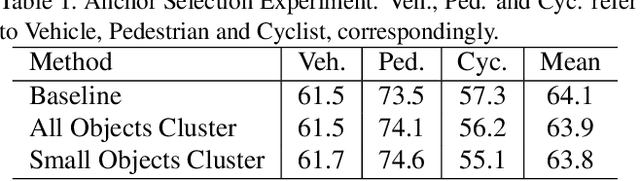
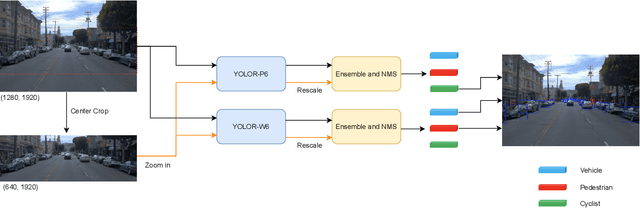
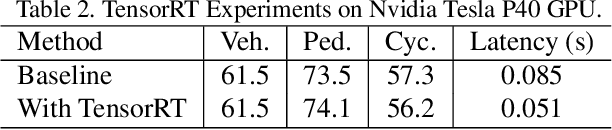
In an autonomous driving system, it is essential to recognize vehicles, pedestrians and cyclists from images. Besides the high accuracy of the prediction, the requirement of real-time running brings new challenges for convolutional network models. In this report, we introduce a real-time method to detect the 2D objects from images. We aggregate several popular one-stage object detectors and train the models of variety input strategies independently, to yield better performance for accurate multi-scale detection of each category, especially for small objects. For model acceleration, we leverage TensorRT to optimize the inference time of our detection pipeline. As shown in the leaderboard, our proposed detection framework ranks the 2nd place with 75.00% L1 mAP and 69.72% L2 mAP in the real-time 2D detection track of the Waymo Open Dataset Challenges, while our framework achieves the latency of 45.8ms/frame on an Nvidia Tesla V100 GPU.