 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2nd Place Solution for VisDA 2021 Challenge -- Universally Domain Adaptive Image Recognition
Oct 27, 2021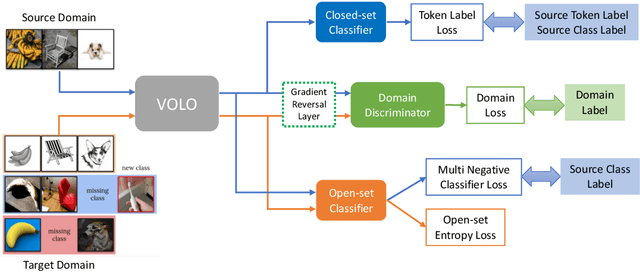
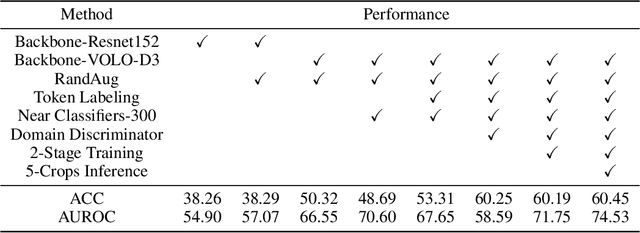
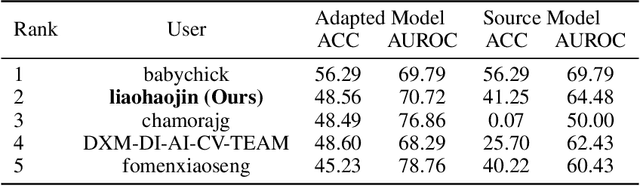
The Visual Domain Adaptation (VisDA) 2021 Challenge calls for unsupervised domain adaptation (UDA) methods that can deal with both input distribution shift and label set variance between the source and target domains. In this report, we introduce a universal domain adaptation (UniDA) method by aggregating several popular feature extraction and domain adaptation schemes. First, we utilize VOLO, a Transformer-based architecture with state-of-the-art performance in several visual tasks, as the backbone to extract effective feature representations. Second, we modify the open-set classifier of OVANet to recognize the unknown class with competitive accuracy and robustness. As shown in the leaderboard, our proposed UniDA method ranks the 2nd place with 48.56% ACC and 70.72% AUROC in the VisDA 2021 Challenge.
2nd Place Solution for Waymo Open Dataset Challenge -- Real-time 2D Object Detection
Jun 16, 2021
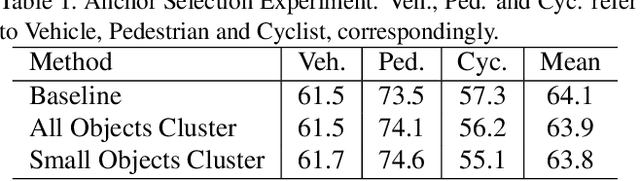
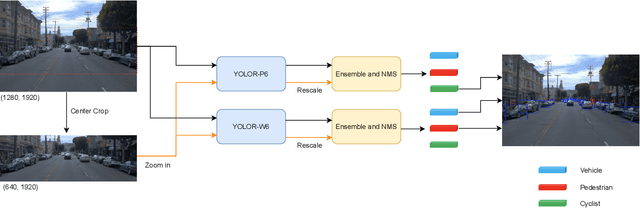
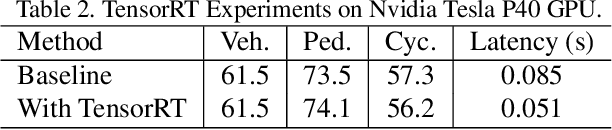
In an autonomous driving system, it is essential to recognize vehicles, pedestrians and cyclists from images. Besides the high accuracy of the prediction, the requirement of real-time running brings new challenges for convolutional network models. In this report, we introduce a real-time method to detect the 2D objects from images. We aggregate several popular one-stage object detectors and train the models of variety input strategies independently, to yield better performance for accurate multi-scale detection of each category, especially for small objects. For model acceleration, we leverage TensorRT to optimize the inference time of our detection pipeline. As shown in the leaderboard, our proposed detection framework ranks the 2nd place with 75.00% L1 mAP and 69.72% L2 mAP in the real-time 2D detection track of the Waymo Open Dataset Challenges, while our framework achieves the latency of 45.8ms/frame on an Nvidia Tesla V100 GPU.