 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Sword, Shield, and Achilles' Heel: Characterizing the Linguistic Inductive Bias of Large Language Models for Spatial Reasoning in Navigation Planning
May 29, 2026Large Language Model (LLM)-based navigation systems commonly construct explicit spatial representations (e.g., topological graphs, semantic raster maps) and translate them into textual descriptions as LLMs' inputs. However, the linguistic structures of such text-based spatial representations and the choices of contextual features (e.g., topology, geometry) they contain are often treated as neutral engineering decisions rather than key factors that shape LLMs' behavior. To fill the gap, we propose a dual-interventional framework that disentangles linguistic structures from different contextual cues to evaluate the linguistic inductive bias of LLMs for navigation planning. In the framework, representation intervention varies the linguistic format and the degree of linguistic compression, clarifying when linguistic representations support or inhibit navigation planning. Context intervention, combined with contextual feature combination and conflict probing, explicitly clarifies the preferences and weaknesses of LLMs when processing different contextual cues. Experiments across diverse spatial reasoning tasks and multiple model scales reveal a consistent pattern: topological information is a sturdy shield and the backbone of robust planning; linguistic format is a double-edged sword whose effect depends on model size, task demands, and the compression level; and semantic information is a fatal Achilles' heel -- incorrect semantic cues can systematically derail the planning process. Overall, our study shows that effective text-based spatial representations in LLM-based navigation should preserve topological integrity, calibrate representational compression to model capacity, and ensure semantic correctness, rather than simply adopting a single representation. Our code is publicly available at https://github.com/jonesdong150/LLM-Navigation-Inductive-Bias.
NeuroLoc: Encoding Navigation Cells for 6-DOF Camera Localization
May 02, 2025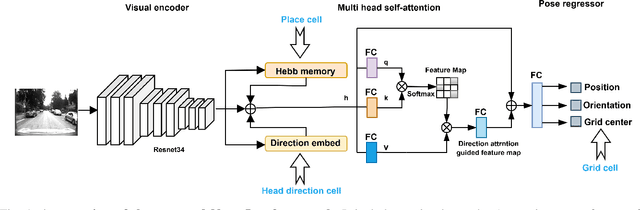
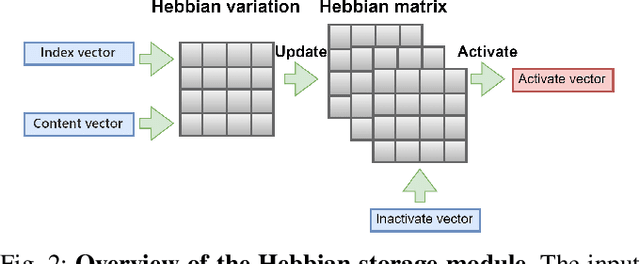
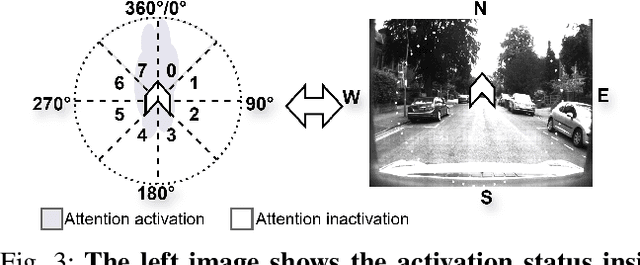
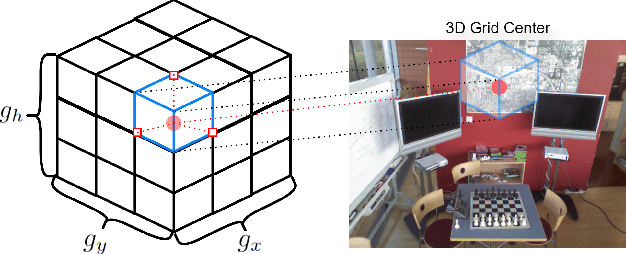
Recently, camera localization has been widely adopted in autonomous robotic navigation due to its efficiency and convenience. However, autonomous navigation in unknown environments often suffers from scene ambiguity, environmental disturbances, and dynamic object transformation in camera localization. To address this problem, inspired by the biological brain navigation mechanism (such as grid cells, place cells, and head direction cells), we propose a novel neurobiological camera location method, namely NeuroLoc. Firstly, we designed a Hebbian learning module driven by place cells to save and replay historical information, aiming to restore the details of historical representations and solve the issue of scene fuzziness. Secondly, we utilized the head direction cell-inspired internal direction learning as multi-head attention embedding to help restore the true orientation in similar scenes. Finally, we added a 3D grid center prediction in the pose regression module to reduce the final wrong prediction. We evaluate the proposed NeuroLoc on commonly used benchmark indoor and outdoor datasets. The experimental results show that our NeuroLoc can enhance the robustness in complex environments and improve the performance of pose regression by using only a single image.
KiteRunner: Language-Driven Cooperative Local-Global Navigation Policy with UAV Mapping in Outdoor Environments
Mar 11, 2025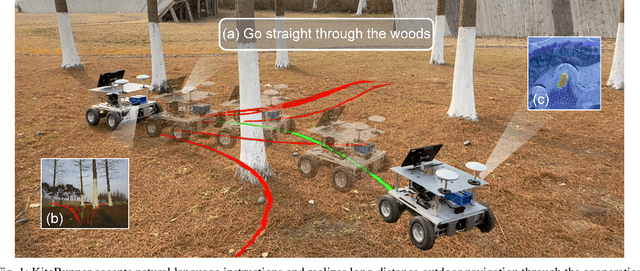
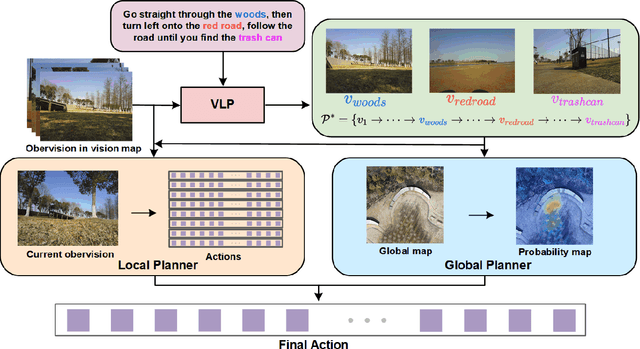
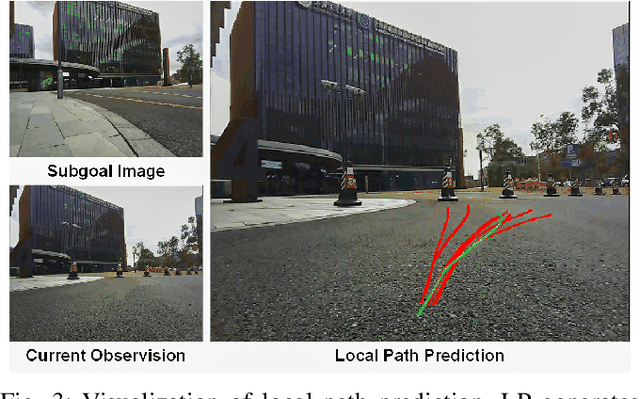
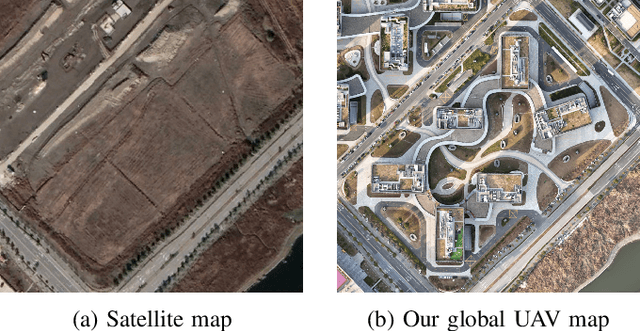
Autonomous navigation in open-world outdoor environments faces challenges in integrating dynamic conditions, long-distance spatial reasoning, and semantic understanding. Traditional methods struggle to balance local planning, global planning, and semantic task execution, while existing large language models (LLMs) enhance semantic comprehension but lack spatial reasoning capabilities. Although diffusion models excel in local optimization, they fall short in large-scale long-distance navigation. To address these gaps, this paper proposes KiteRunner, a language-driven cooperative local-global navigation strategy that combines UAV orthophoto-based global planning with diffusion model-driven local path generation for long-distance navigation in open-world scenarios. Our method innovatively leverages real-time UAV orthophotography to construct a global probability map, providing traversability guidance for the local planner, while integrating large models like CLIP and GPT to interpret natural language instructions. Experiments demonstrate that KiteRunner achieves 5.6% and 12.8% improvements in path efficiency over state-of-the-art methods in structured and unstructured environments, respectively, with significant reductions in human interventions and execution time.
Dual-BEV Nav: Dual-layer BEV-based Heuristic Path Planning for Robotic Navigation in Unstructured Outdoor Environments
Jan 30, 2025



Path planning with strong environmental adaptability plays a crucial role in robotic navigation in unstructured outdoor environments, especially in the case of low-quality location and map information. The path planning ability of a robot depends on the identification of the traversability of global and local ground areas. In real-world scenarios, the complexity of outdoor open environments makes it difficult for robots to identify the traversability of ground areas that lack a clearly defined structure. Moreover, most existing methods have rarely analyzed the integration of local and global traversability identifications in unstructured outdoor scenarios. To address this problem, we propose a novel method, Dual-BEV Nav, first introducing Bird's Eye View (BEV) representations into local planning to generate high-quality traversable paths. Then, these paths are projected onto the global traversability map generated by the global BEV planning model to obtain the optimal waypoints. By integrating the traversability from both local and global BEV, we establish a dual-layer BEV heuristic planning paradigm, enabling long-distance navigation in unstructured outdoor environments. We test our approach through both public dataset evaluations and real-world robot deployments, yielding promising results. Compared to baselines, the Dual-BEV Nav improved temporal distance prediction accuracy by up to $18.7\%$. In the real-world deployment, under conditions significantly different from the training set and with notable occlusions in the global BEV, the Dual-BEV Nav successfully achieved a 65-meter-long outdoor navigation. Further analysis demonstrates that the local BEV representation significantly enhances the rationality of the planning, while the global BEV probability map ensures the robustness of the overall planning.
Integrating Multiple Sources Knowledge for Class Asymmetry Domain Adaptation Segmentation of Remote Sensing Images
May 17, 2023



In the existing unsupervised domain adaptation (UDA) methods for remote sensing images (RSIs) semantic segmentation, class symmetry is an widely followed ideal assumption, where the source and target RSIs have exactly the same class space. In practice, however, it is often very difficult to find a source RSI with exactly the same classes as the target RSI. More commonly, there are multiple source RSIs available. To this end, a novel class asymmetry RSIs domain adaptation method with multiple sources is proposed in this paper, which consists of four key components. Firstly, a multi-branch segmentation network is built to learn an expert for each source RSI. Secondly, a novel collaborative learning method with the cross-domain mixing strategy is proposed, to supplement the class information for each source while achieving the domain adaptation of each source-target pair. Thirdly, a pseudo-label generation strategy is proposed to effectively combine strengths of different experts, which can be flexibly applied to two cases where the source class union is equal to or includes the target class set. Fourthly, a multiview-enhanced knowledge integration module is developed for the high-level knowledge routing and transfer from multiple domains to target predictions.