 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroLoc: Encoding Navigation Cells for 6-DOF Camera Localization
May 02, 2025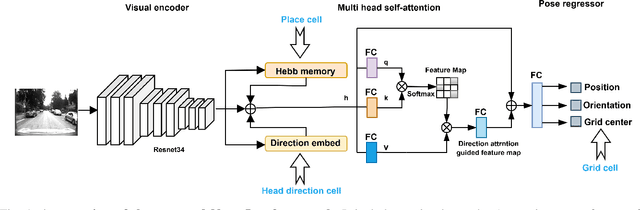
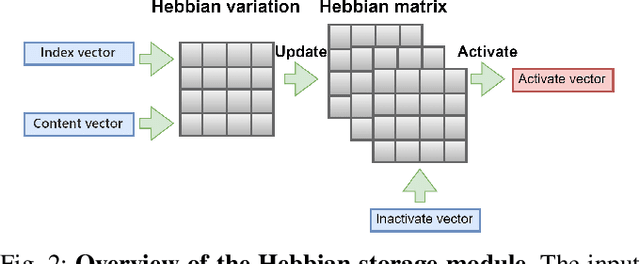
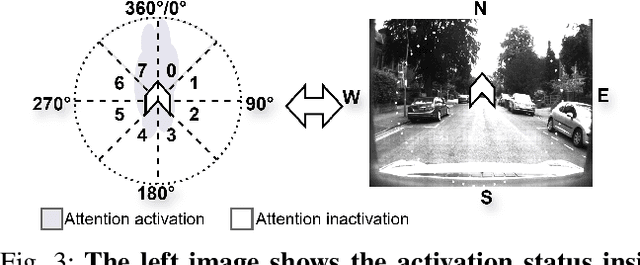
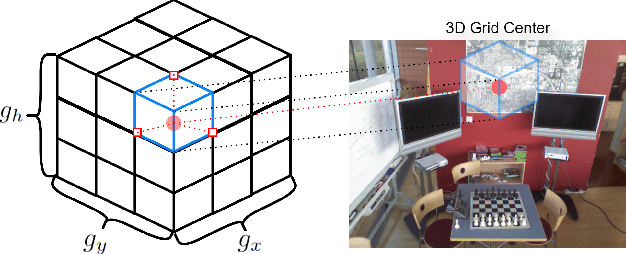
Recently, camera localization has been widely adopted in autonomous robotic navigation due to its efficiency and convenience. However, autonomous navigation in unknown environments often suffers from scene ambiguity, environmental disturbances, and dynamic object transformation in camera localization. To address this problem, inspired by the biological brain navigation mechanism (such as grid cells, place cells, and head direction cells), we propose a novel neurobiological camera location method, namely NeuroLoc. Firstly, we designed a Hebbian learning module driven by place cells to save and replay historical information, aiming to restore the details of historical representations and solve the issue of scene fuzziness. Secondly, we utilized the head direction cell-inspired internal direction learning as multi-head attention embedding to help restore the true orientation in similar scenes. Finally, we added a 3D grid center prediction in the pose regression module to reduce the final wrong prediction. We evaluate the proposed NeuroLoc on commonly used benchmark indoor and outdoor datasets. The experimental results show that our NeuroLoc can enhance the robustness in complex environments and improve the performance of pose regression by using only a single image.
KiteRunner: Language-Driven Cooperative Local-Global Navigation Policy with UAV Mapping in Outdoor Environments
Mar 11, 2025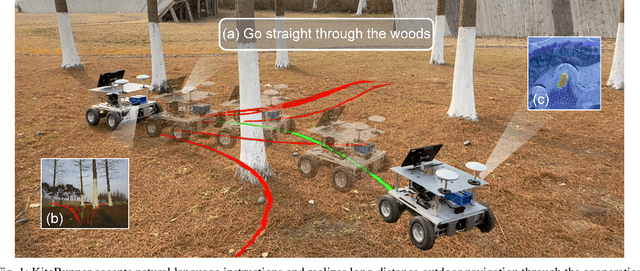
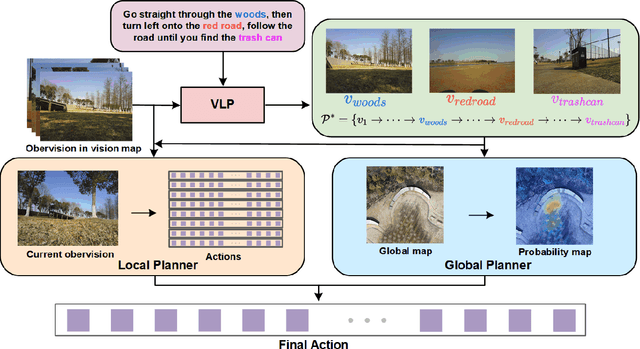
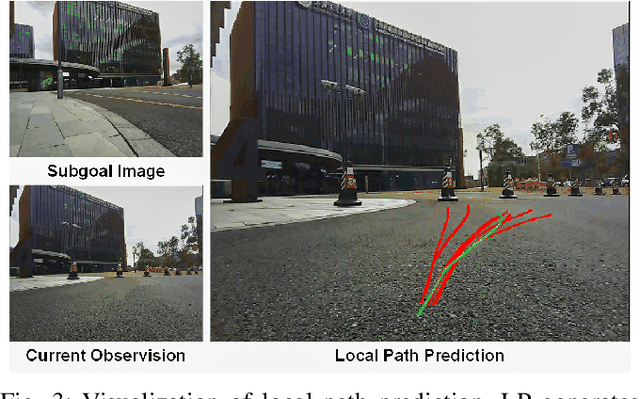
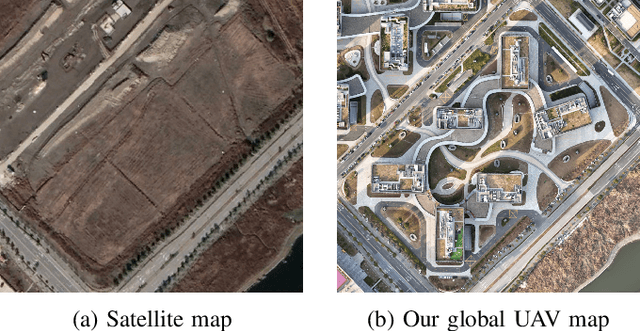
Autonomous navigation in open-world outdoor environments faces challenges in integrating dynamic conditions, long-distance spatial reasoning, and semantic understanding. Traditional methods struggle to balance local planning, global planning, and semantic task execution, while existing large language models (LLMs) enhance semantic comprehension but lack spatial reasoning capabilities. Although diffusion models excel in local optimization, they fall short in large-scale long-distance navigation. To address these gaps, this paper proposes KiteRunner, a language-driven cooperative local-global navigation strategy that combines UAV orthophoto-based global planning with diffusion model-driven local path generation for long-distance navigation in open-world scenarios. Our method innovatively leverages real-time UAV orthophotography to construct a global probability map, providing traversability guidance for the local planner, while integrating large models like CLIP and GPT to interpret natural language instructions. Experiments demonstrate that KiteRunner achieves 5.6% and 12.8% improvements in path efficiency over state-of-the-art methods in structured and unstructured environments, respectively, with significant reductions in human interventions and execution time.
Relaxed Rotational Equivariance via $G$-Biases in Vision
Aug 25, 2024



Group Equivariant Convolution (GConv) can effectively handle rotational symmetry data. They assume uniform and strict rotational symmetry across all features, as the transformations under the specific group. However, real-world data rarely conforms to strict rotational symmetry commonly referred to as Rotational Symmetry-Breaking in the system or dataset, making GConv unable to adapt effectively to this phenomenon. Motivated by this, we propose a simple but highly effective method to address this problem, which utilizes a set of learnable biases called the $G$-Biases under the group order to break strict group constraints and achieve \textbf{R}elaxed \textbf{R}otational \textbf{E}quivarant \textbf{Conv}olution (RREConv). We conduct extensive experiments to validate Relaxed Rotational Equivariance on rotational symmetry groups $\mathcal{C}_n$ (e.g. $\mathcal{C}_2$, $\mathcal{C}_4$, and $\mathcal{C}_6$ groups). Further experiments demonstrate that our proposed RREConv-based methods achieve excellent performance, compared to existing GConv-based methods in classification and detection tasks on natural image datasets.