 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKiteRunner: Language-Driven Cooperative Local-Global Navigation Policy with UAV Mapping in Outdoor Environments
Mar 11, 2025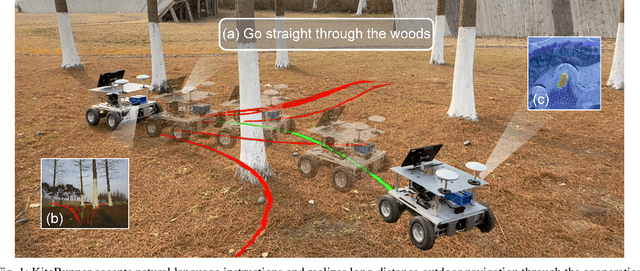
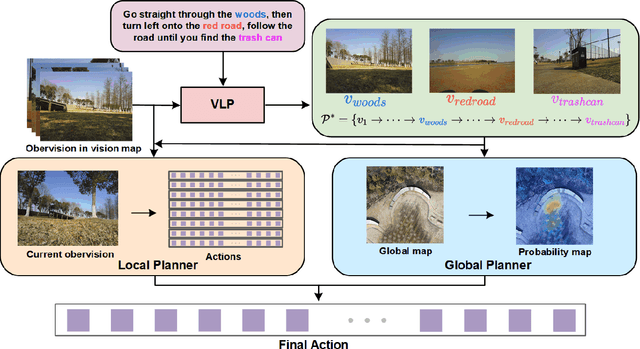
Autonomous navigation in open-world outdoor environments faces challenges in integrating dynamic conditions, long-distance spatial reasoning, and semantic understanding. Traditional methods struggle to balance local planning, global planning, and semantic task execution, while existing large language models (LLMs) enhance semantic comprehension but lack spatial reasoning capabilities. Although diffusion models excel in local optimization, they fall short in large-scale long-distance navigation. To address these gaps, this paper proposes KiteRunner, a language-driven cooperative local-global navigation strategy that combines UAV orthophoto-based global planning with diffusion model-driven local path generation for long-distance navigation in open-world scenarios. Our method innovatively leverages real-time UAV orthophotography to construct a global probability map, providing traversability guidance for the local planner, while integrating large models like CLIP and GPT to interpret natural language instructions. Experiments demonstrate that KiteRunner achieves 5.6% and 12.8% improvements in path efficiency over state-of-the-art methods in structured and unstructured environments, respectively, with significant reductions in human interventions and execution time.
Dual-BEV Nav: Dual-layer BEV-based Heuristic Path Planning for Robotic Navigation in Unstructured Outdoor Environments
Jan 30, 2025



Path planning with strong environmental adaptability plays a crucial role in robotic navigation in unstructured outdoor environments, especially in the case of low-quality location and map information. The path planning ability of a robot depends on the identification of the traversability of global and local ground areas. In real-world scenarios, the complexity of outdoor open environments makes it difficult for robots to identify the traversability of ground areas that lack a clearly defined structure. Moreover, most existing methods have rarely analyzed the integration of local and global traversability identifications in unstructured outdoor scenarios. To address this problem, we propose a novel method, Dual-BEV Nav, first introducing Bird's Eye View (BEV) representations into local planning to generate high-quality traversable paths. Then, these paths are projected onto the global traversability map generated by the global BEV planning model to obtain the optimal waypoints. By integrating the traversability from both local and global BEV, we establish a dual-layer BEV heuristic planning paradigm, enabling long-distance navigation in unstructured outdoor environments. We test our approach through both public dataset evaluations and real-world robot deployments, yielding promising results. Compared to baselines, the Dual-BEV Nav improved temporal distance prediction accuracy by up to $18.7\%$. In the real-world deployment, under conditions significantly different from the training set and with notable occlusions in the global BEV, the Dual-BEV Nav successfully achieved a 65-meter-long outdoor navigation. Further analysis demonstrates that the local BEV representation significantly enhances the rationality of the planning, while the global BEV probability map ensures the robustness of the overall planning.