 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication of Multiple Chain-of-Thought in Contrastive Reasoning for Implicit Sentiment Analysis
Mar 10, 2025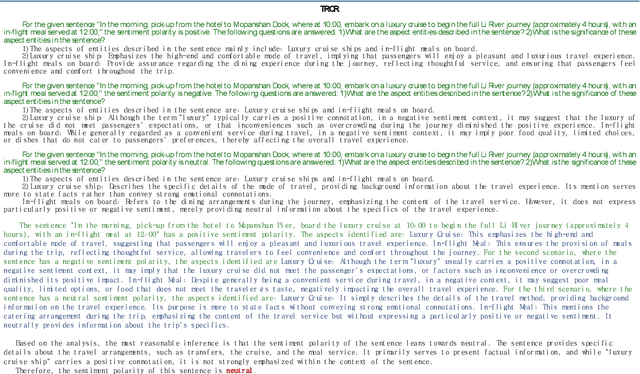
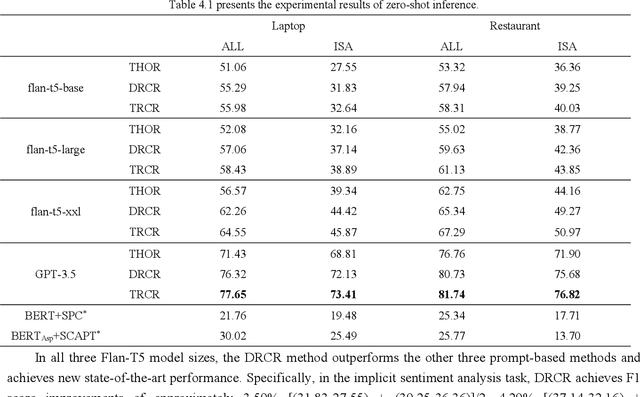
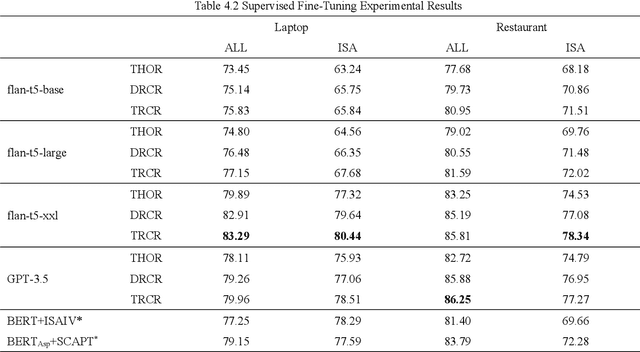
Implicit sentiment analysis aims to uncover emotions that are subtly expressed, often obscured by ambiguity and figurative language. To accomplish this task, large language models and multi-step reasoning are needed to identify those sentiments that are not explicitly stated. In this study, we propose a novel Dual Reverse Chain Reasoning (DRCR) framework to enhance the performance of implicit sentiment analysis. Inspired by deductive reasoning, the framework consists of three key steps: 1) hypothesize an emotional polarity and derive a reasoning process, 2) negate the initial hypothesis and derive a new reasoning process, and 3) contrast the two reasoning paths to deduce the final sentiment polarity. Building on this, we also introduce a Triple Reverse Chain Reasoning (TRCR) framework to address the limitations of random hypotheses. Both methods combine contrastive mechanisms and multi-step reasoning, significantly improving the accuracy of implicit sentiment classification. Experimental results demonstrate that both approaches outperform existing methods across various model scales, achieving state-of-the-art performance. This validates the effectiveness of combining contrastive reasoning and multi-step reasoning for implicit sentiment analysis.
GMSR:Gradient-Guided Mamba for Spectral Reconstruction from RGB Images
May 13, 2024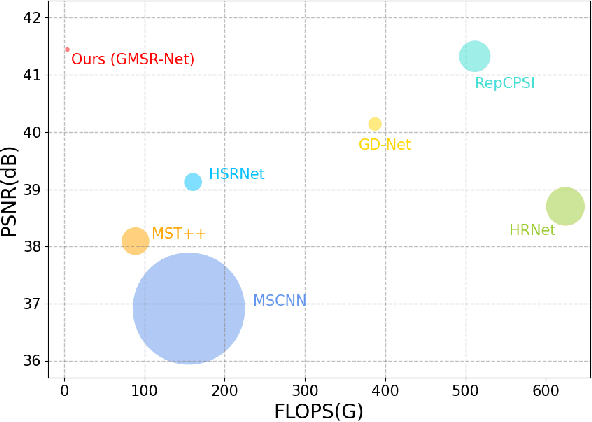
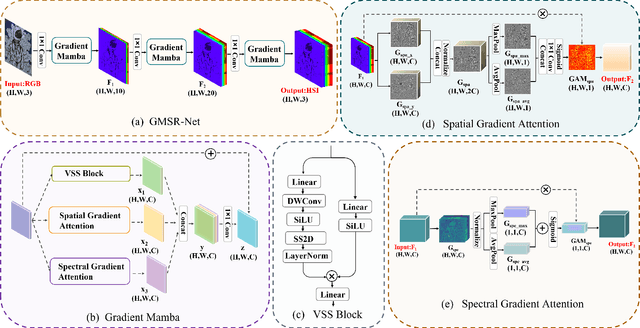
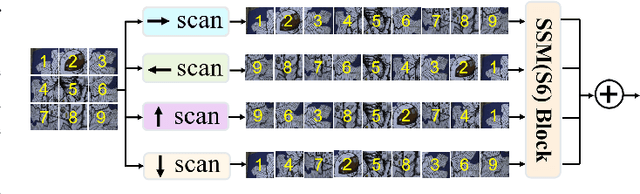
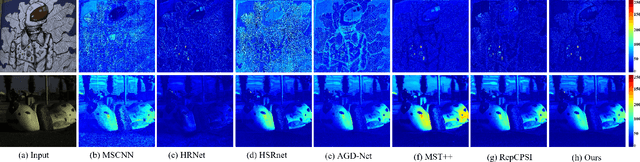
Mainstream approaches to spectral reconstruction (SR) primarily focus on designing Convolution- and Transformer-based architectures. However, CNN methods often face challenges in handling long-range dependencies, whereas Transformers are constrained by computational efficiency limitations. Recent breakthroughs in state-space model (e.g., Mamba) has attracted significant attention due to its near-linear computational efficiency and superior performance, prompting our investigation into its potential for SR problem. To this end, we propose the Gradient-guided Mamba for Spectral Reconstruction from RGB Images, dubbed GMSR-Net. GMSR-Net is a lightweight model characterized by a global receptive field and linear computational complexity. Its core comprises multiple stacked Gradient Mamba (GM) blocks, each featuring a tri-branch structure. In addition to benefiting from efficient global feature representation by Mamba block, we further innovatively introduce spatial gradient attention and spectral gradient attention to guide the reconstruction of spatial and spectral cues. GMSR-Net demonstrates a significant accuracy-efficiency trade-off, achieving state-of-the-art performance while markedly reducing the number of parameters and computational burdens. Compared to existing approaches, GMSR-Net slashes parameters and FLOPS by substantial margins of 10 times and 20 times, respectively. Code is available at https://github.com/wxy11-27/GMSR.
Underwater Variable Zoom: Depth-Guided Perception Network for Underwater Image Enhancement
May 02, 2024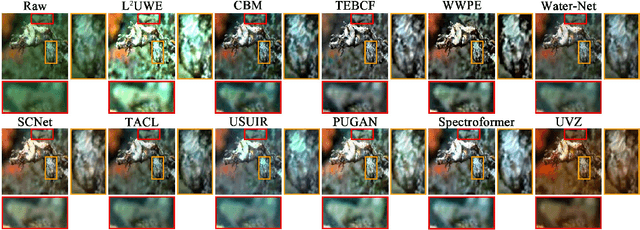



Underwater scenes intrinsically involve degradation problems owing to heterogeneous ocean elements. Prevailing underwater image enhancement (UIE) methods stick to straightforward feature modeling to learn the mapping function, which leads to limited vision gain as it lacks more explicit physical cues (e.g., depth). In this work, we investigate injecting the depth prior into the deep UIE model for more precise scene enhancement capability. To this end, we present a novel depth-guided perception UIE framework, dubbed underwater variable zoom (UVZ). Specifically, UVZ resorts to a two-stage pipeline. First, a depth estimation network is designed to generate critical depth maps, combined with an auxiliary supervision network introduced to suppress estimation differences during training. Second, UVZ parses near-far scenarios by harnessing the predicted depth maps, enabling local and non-local perceiving in different regions. Extensive experiments on five benchmark datasets demonstrate that UVZ achieves superior visual gain and delivers promising quantitative metrics. Besides, UVZ is confirmed to exhibit good generalization in some visual tasks, especially in unusual lighting conditions. The code, models and results are available at: https://github.com/WindySprint/UVZ.
SoccerNet 2022 Challenges Results
Oct 05, 2022
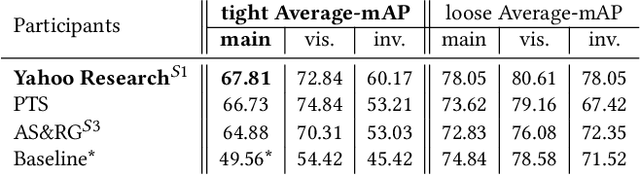
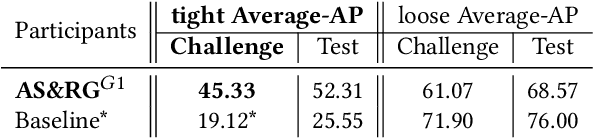
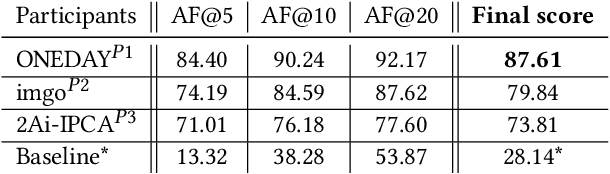
The SoccerNet 2022 challenges were the second annual video understanding challenges organized by the SoccerNet team. In 2022, the challenges were composed of 6 vision-based tasks: (1) action spotting, focusing on retrieving action timestamps in long untrimmed videos, (2) replay grounding, focusing on retrieving the live moment of an action shown in a replay, (3) pitch localization, focusing on detecting line and goal part elements, (4) camera calibration, dedicated to retrieving the intrinsic and extrinsic camera parameters, (5) player re-identification, focusing on retrieving the same players across multiple views, and (6) multiple object tracking, focusing on tracking players and the ball through unedited video streams. Compared to last year's challenges, tasks (1-2) had their evaluation metrics redefined to consider tighter temporal accuracies, and tasks (3-6) were novel, including their underlying data and annotations. More information on the tasks, challenges and leaderboards are available on https://www.soccer-net.org. Baselines and development kits are available on https://github.com/SoccerNet.