 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGMSR:Gradient-Guided Mamba for Spectral Reconstruction from RGB Images
May 13, 2024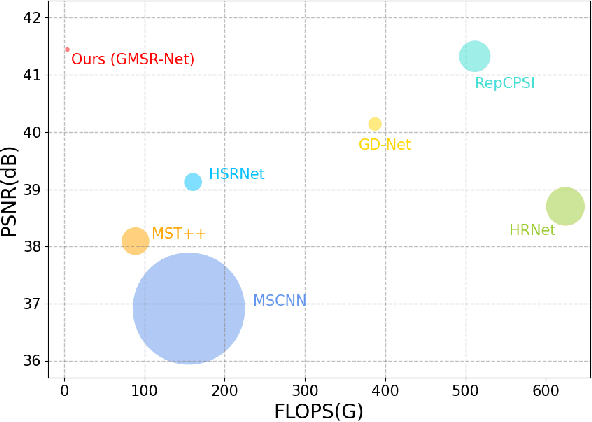
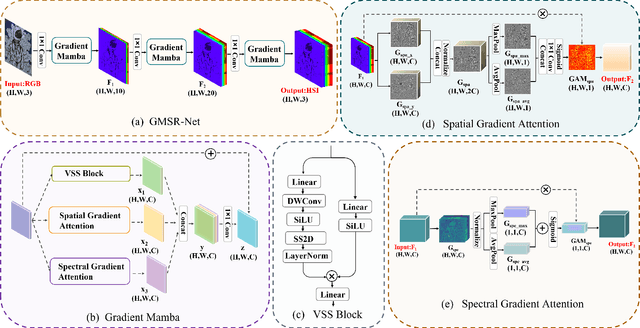
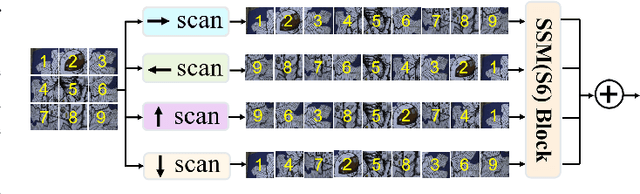
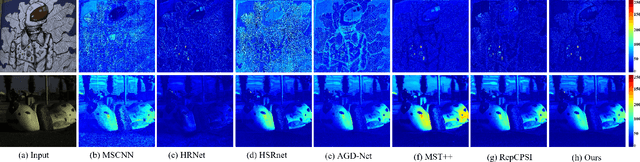
Mainstream approaches to spectral reconstruction (SR) primarily focus on designing Convolution- and Transformer-based architectures. However, CNN methods often face challenges in handling long-range dependencies, whereas Transformers are constrained by computational efficiency limitations. Recent breakthroughs in state-space model (e.g., Mamba) has attracted significant attention due to its near-linear computational efficiency and superior performance, prompting our investigation into its potential for SR problem. To this end, we propose the Gradient-guided Mamba for Spectral Reconstruction from RGB Images, dubbed GMSR-Net. GMSR-Net is a lightweight model characterized by a global receptive field and linear computational complexity. Its core comprises multiple stacked Gradient Mamba (GM) blocks, each featuring a tri-branch structure. In addition to benefiting from efficient global feature representation by Mamba block, we further innovatively introduce spatial gradient attention and spectral gradient attention to guide the reconstruction of spatial and spectral cues. GMSR-Net demonstrates a significant accuracy-efficiency trade-off, achieving state-of-the-art performance while markedly reducing the number of parameters and computational burdens. Compared to existing approaches, GMSR-Net slashes parameters and FLOPS by substantial margins of 10 times and 20 times, respectively. Code is available at https://github.com/wxy11-27/GMSR.
Underwater Variable Zoom: Depth-Guided Perception Network for Underwater Image Enhancement
May 02, 2024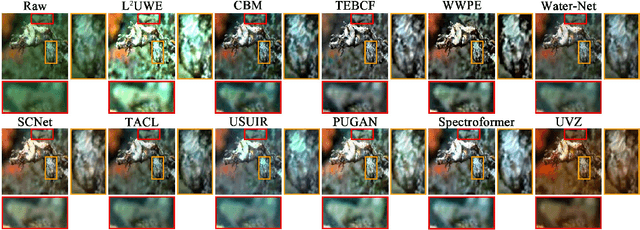



Underwater scenes intrinsically involve degradation problems owing to heterogeneous ocean elements. Prevailing underwater image enhancement (UIE) methods stick to straightforward feature modeling to learn the mapping function, which leads to limited vision gain as it lacks more explicit physical cues (e.g., depth). In this work, we investigate injecting the depth prior into the deep UIE model for more precise scene enhancement capability. To this end, we present a novel depth-guided perception UIE framework, dubbed underwater variable zoom (UVZ). Specifically, UVZ resorts to a two-stage pipeline. First, a depth estimation network is designed to generate critical depth maps, combined with an auxiliary supervision network introduced to suppress estimation differences during training. Second, UVZ parses near-far scenarios by harnessing the predicted depth maps, enabling local and non-local perceiving in different regions. Extensive experiments on five benchmark datasets demonstrate that UVZ achieves superior visual gain and delivers promising quantitative metrics. Besides, UVZ is confirmed to exhibit good generalization in some visual tasks, especially in unusual lighting conditions. The code, models and results are available at: https://github.com/WindySprint/UVZ.
Policy Representation via Diffusion Probability Model for Reinforcement Learning
May 22, 2023Popular reinforcement learning (RL) algorithms tend to produce a unimodal policy distribution, which weakens the expressiveness of complicated policy and decays the ability of exploration. The diffusion probability model is powerful to learn complicated multimodal distributions, which has shown promising and potential applications to RL. In this paper, we formally build a theoretical foundation of policy representation via the diffusion probability model and provide practical implementations of diffusion policy for online model-free RL. Concretely, we character diffusion policy as a stochastic process, which is a new approach to representing a policy. Then we present a convergence guarantee for diffusion policy, which provides a theory to understand the multimodality of diffusion policy. Furthermore, we propose the DIPO which is an implementation for model-free online RL with DIffusion POlicy. To the best of our knowledge, DIPO is the first algorithm to solve model-free online RL problems with the diffusion model. Finally, extensive empirical results show the effectiveness and superiority of DIPO on the standard continuous control Mujoco benchmark.