 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiSwift: Bandwidth Orchestrator for Multi-Stream Video Analytics on Edge
Dec 25, 2023


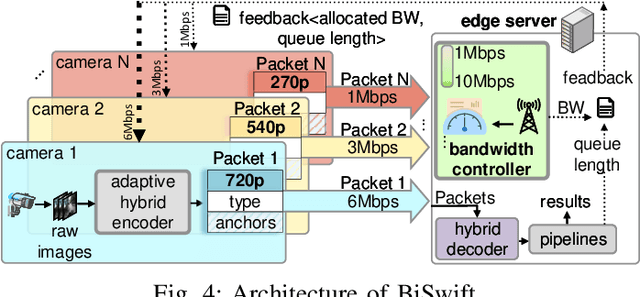
High-definition (HD) cameras for surveillance and road traffic have experienced tremendous growth, demanding intensive computation resources for real-time analytics. Recently, offloading frames from the front-end device to the back-end edge server has shown great promise. In multi-stream competitive environments, efficient bandwidth management and proper scheduling are crucial to ensure both high inference accuracy and high throughput. To achieve this goal, we propose BiSwift, a bi-level framework that scales the concurrent real-time video analytics by a novel adaptive hybrid codec integrated with multi-level pipelines, and a global bandwidth controller for multiple video streams. The lower-level front-back-end collaborative mechanism (called adaptive hybrid codec) locally optimizes the accuracy and accelerates end-to-end video analytics for a single stream. The upper-level scheduler aims to accuracy fairness among multiple streams via the global bandwidth controller. The evaluation of BiSwift shows that BiSwift is able to real-time object detection on 9 streams with an edge device only equipped with an NVIDIA RTX3070 (8G) GPU. BiSwift improves 10%$\sim$21% accuracy and presents 1.2$\sim$9$\times$ throughput compared with the state-of-the-art video analytics pipelines.
MM-BigBench: Evaluating Multimodal Models on Multimodal Content Comprehension Tasks
Oct 13, 2023The popularity of multimodal large language models (MLLMs) has triggered a recent surge in research efforts dedicated to evaluating these models. Nevertheless, existing evaluation studies of MLLMs primarily focus on the comprehension and reasoning of unimodal (vision) content, neglecting performance evaluations in the domain of multimodal (vision-language) content understanding. Beyond multimodal reasoning, tasks related to multimodal content comprehension necessitate a profound understanding of multimodal contexts, achieved through the multimodal interaction to obtain a final answer. In this paper, we introduce a comprehensive assessment framework called MM-BigBench, which incorporates a diverse range of metrics to offer an extensive evaluation of the performance of various models and instructions across a wide spectrum of diverse multimodal content comprehension tasks. Consequently, our work complements research on the performance of MLLMs in multimodal comprehension tasks, achieving a more comprehensive and holistic evaluation of MLLMs. To begin, we employ the Best Performance metric to ascertain each model's performance upper bound on different datasets. Subsequently, the Mean Relative Gain metric offers an assessment of the overall performance of various models and instructions, while the Stability metric measures their sensitivity. Furthermore, previous research centers on evaluating models independently or solely assessing instructions, neglecting the adaptability between models and instructions. We propose the Adaptability metric to quantify the adaptability between models and instructions. Our paper evaluates a total of 20 language models (14 MLLMs) on 14 multimodal datasets spanning 6 tasks, with 10 instructions for each task, and derives novel insights. Our code will be released at https://github.com/declare-lab/MM-BigBench.
AccDecoder: Accelerated Decoding for Neural-enhanced Video Analytics
Jan 24, 2023The quality of the video stream is key to neural network-based video analytics. However, low-quality video is inevitably collected by existing surveillance systems because of poor quality cameras or over-compressed/pruned video streaming protocols, e.g., as a result of upstream bandwidth limit. To address this issue, existing studies use quality enhancers (e.g., neural super-resolution) to improve the quality of videos (e.g., resolution) and eventually ensure inference accuracy. Nevertheless, directly applying quality enhancers does not work in practice because it will introduce unacceptable latency. In this paper, we present AccDecoder, a novel accelerated decoder for real-time and neural-enhanced video analytics. AccDecoder can select a few frames adaptively via Deep Reinforcement Learning (DRL) to enhance the quality by neural super-resolution and then up-scale the unselected frames that reference them, which leads to 6-21% accuracy improvement. AccDecoder provides efficient inference capability via filtering important frames using DRL for DNN-based inference and reusing the results for the other frames via extracting the reference relationship among frames and blocks, which results in a latency reduction of 20-80% than baselines.
DACOM: Learning Delay-Aware Communication for Multi-Agent Reinforcement Learning
Dec 03, 2022Communication is supposed to improve multi-agent collaboration and overall performance in cooperative Multi-agent reinforcement learning (MARL). However, such improvements are prevalently limited in practice since most existing communication schemes ignore communication overheads (e.g., communication delays). In this paper, we demonstrate that ignoring communication delays has detrimental effects on collaborations, especially in delay-sensitive tasks such as autonomous driving. To mitigate this impact, we design a delay-aware multi-agent communication model (DACOM) to adapt communication to delays. Specifically, DACOM introduces a component, TimeNet, that is responsible for adjusting the waiting time of an agent to receive messages from other agents such that the uncertainty associated with delay can be addressed. Our experiments reveal that DACOM has a non-negligible performance improvement over other mechanisms by making a better trade-off between the benefits of communication and the costs of waiting for messages.
PP-MARL: Efficient Privacy-Preserving MARL for Cooperative Intelligence in Communication
Apr 26, 2022

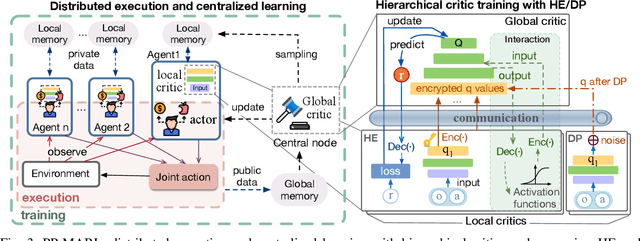
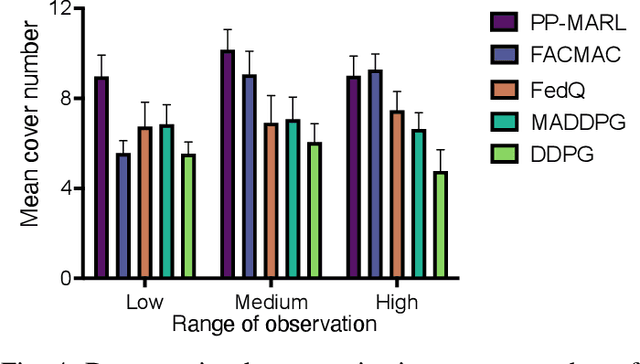
Artificial intelligence (AI) has been introduced in communication networks and services to improve efficiency via self-optimization. Cooperative intelligence (CI), also known as collective intelligence and collaborative intelligence, is expected to become an integral element in next-generation networks because it can aggregate the capabilities and intelligence of multiple devices. However, privacy issues may intimidate, obstruct, and hinder the deployment of CI in practice because collaboration heavily relies on data and information sharing. Additional practical constraints in communication (e.g., limited bandwidth) further limit the performance of CI. To overcome these challenges, we propose PP-MARL, an efficient privacy-preserving learning scheme based on multi-agent reinforcement learning (MARL). We apply and evaluate our scheme in two communication-related use cases: mobility management in drone-assisted communication and network control with edge intelligence. Simulation results reveal that the proposed scheme can achieve efficient and reliable collaboration with 1.1-6 times better privacy protection and lower overheads (e.g., 84-91% reduction in bandwidth) than state-of-the-art approaches.
RACE: Reinforced Cooperative Autonomous Vehicle Collision AvoidancE
Apr 02, 2020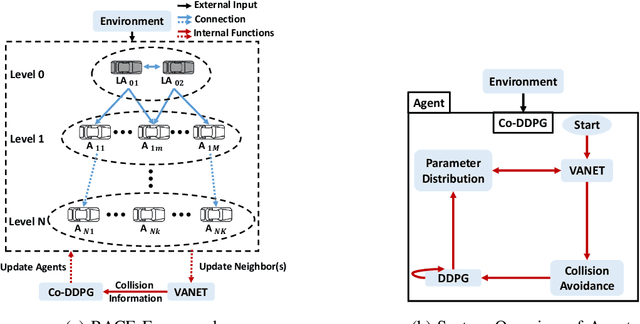
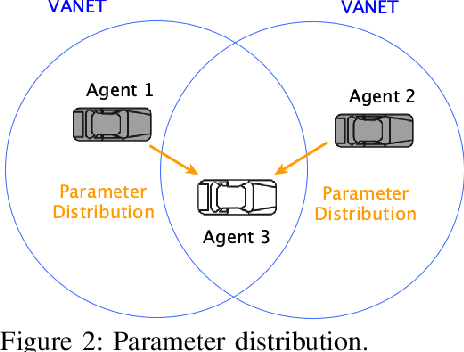
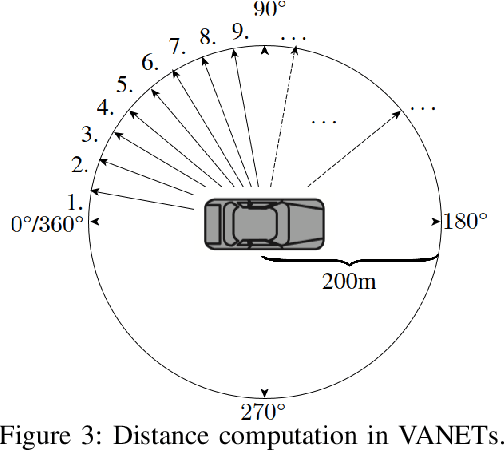
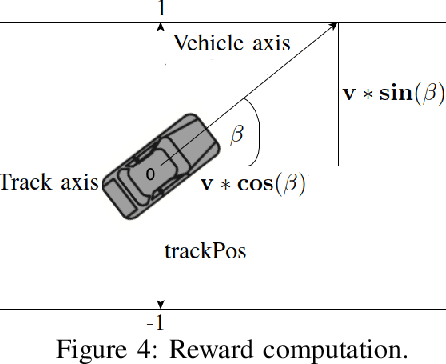
With the rapid development of autonomous driving, collision avoidance has attracted attention from both academia and industry. Many collision avoidance strategies have emerged in recent years, but the dynamic and complex nature of driving environment poses a challenge to develop robust collision avoidance algorithms. Therefore, in this paper, we propose a decentralized framework named RACE: Reinforced Cooperative Autonomous Vehicle Collision AvoidancE. Leveraging a hierarchical architecture we develop an algorithm named Co-DDPG to efficiently train autonomous vehicles. Through a security abiding channel, the autonomous vehicles distribute their driving policies. We use the relative distances obtained by the opponent sensors to build the VANET instead of locations, which ensures the vehicle's location privacy. With a leader-follower architecture and parameter distribution, RACE accelerates the learning of optimal policies and efficiently utilizes the remaining resources. We implement the RACE framework in the widely used TORCS simulator and conduct various experiments to measure the performance of RACE. Evaluations show that RACE quickly learns optimal driving policies and effectively avoids collisions. Moreover, RACE also scales smoothly with varying number of participating vehicles. We further compared RACE with existing autonomous driving systems and show that RACE outperforms them by experiencing 65% less collisions in the training process and exhibits improved performance under varying vehicle density.