 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSADDE: Semi-supervised Anomaly Detection with Dependable Explanations
Nov 18, 2024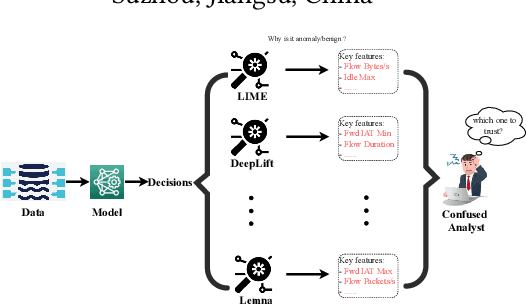
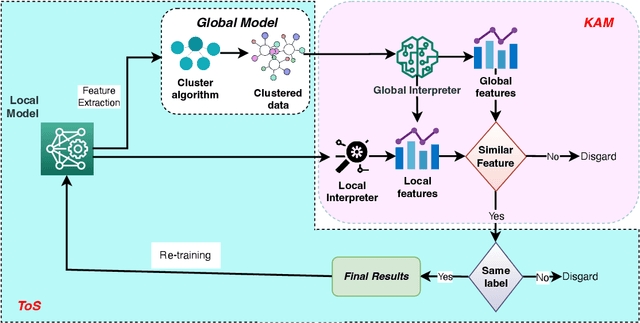
Semi-supervised learning holds a pivotal position in anomaly detection applications, yet identifying anomaly patterns with a limited number of labeled samples poses a significant challenge. Furthermore, the absence of interpretability poses major obstacles to the practical adoption of semi-supervised frameworks. The majority of existing interpretation techniques are tailored for supervised/unsupervised frameworks or non-security domains, falling short in providing dependable interpretations. In this research paper, we introduce SADDE, a general framework designed to accomplish two primary objectives: (1) to render the anomaly detection process interpretable and enhance the credibility of interpretation outcomes, and (2) to assign high-confidence pseudo labels to unlabeled samples, thereby boosting the performance of anomaly detection systems when supervised data is scarce. To achieve the first objective, we devise a cutting-edge interpretation method that utilizes both global and local interpreters to furnish trustworthy explanations. For the second objective, we conceptualize a novel two-stage semi-supervised learning framework tailored for network anomaly detection, ensuring that the model predictions of both stages align with specific constraints. We apply SADDE to two illustrative network anomaly detection tasks and conduct extensive evaluations in comparison with notable prior works. The experimental findings underscore that SADDE is capable of delivering precise detection results alongside dependable interpretations for semi-supervised network anomaly detection systems. The source code for SADDE is accessible at: https://github.com/M-Code-Space/SADDE.
Dynamic Threshold-based Two-layer Online Unsupervised Anomaly Detector
Oct 30, 2024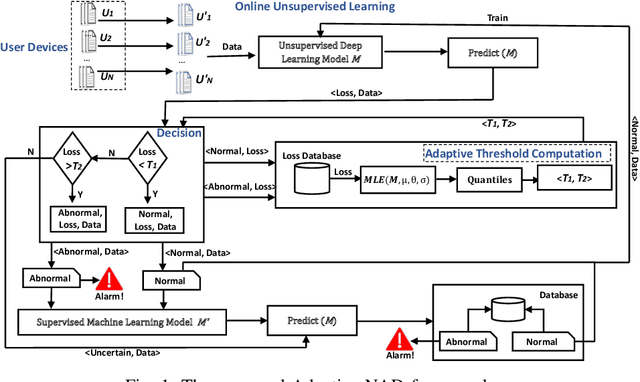
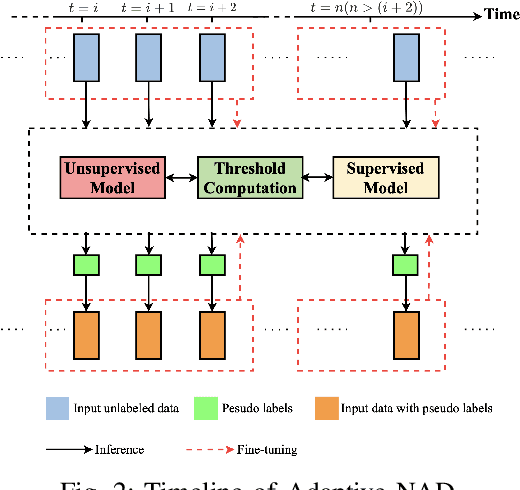
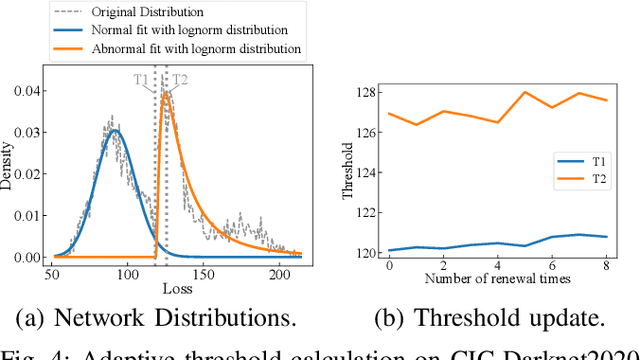
The proliferation of the Internet of Things (IoT) has heightened the vulnerability to cyber threats, making it imperative to develop Anomaly Detection Systems (ADSs) capable of adapting to emerging or novel attacks. Prior research has predominantly concentrated on offline unsupervised learning techniques to protect ADSs, which are impractical for real-world applications. Furthermore, these studies often rely heavily on the assumption of known legitimate behaviors and fall short of meeting the interpretability requirements in security contexts, thereby hindering their practical adoption. In response, this paper introduces Adaptive NAD, a comprehensive framework aimed at enhancing and interpreting online unsupervised anomaly detection within security domains. We propose an interpretable two-layer anomaly detection approach that generates dependable, high-confidence pseudo-labels. Subsequently, we incorporate an online learning mechanism that updates Adaptive NAD using an innovative threshold adjustment method to accommodate new threats. Experimental findings reveal that Adaptive NAD surpasses state-of-the-art solutions by achieving improvements of over 5.4% and 23.0% in SPAUC on the CIC-Darknet2020 and CIC-DoHBrw-2020 datasets, respectively. The code for Adaptive NAD is publicly available at https://github.com/MyLearnCodeSpace/Adaptive-NAD.
RACE: Reinforced Cooperative Autonomous Vehicle Collision AvoidancE
Apr 02, 2020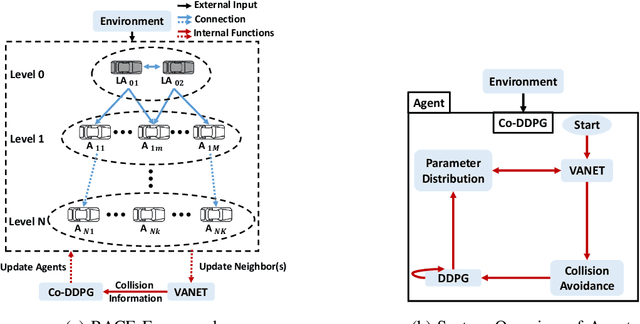
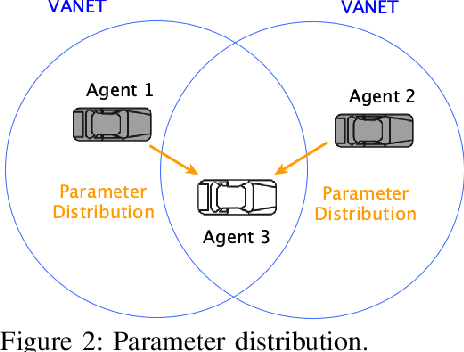
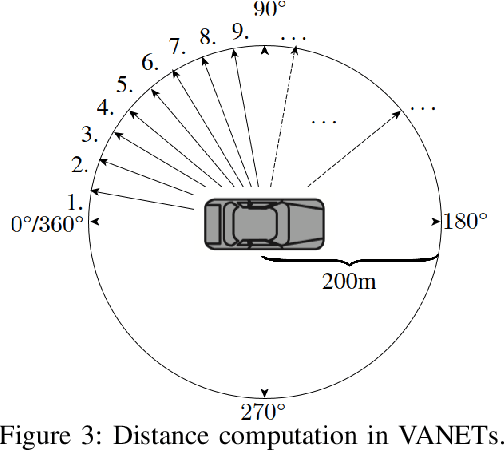
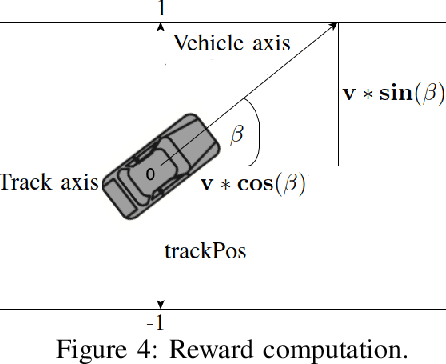
With the rapid development of autonomous driving, collision avoidance has attracted attention from both academia and industry. Many collision avoidance strategies have emerged in recent years, but the dynamic and complex nature of driving environment poses a challenge to develop robust collision avoidance algorithms. Therefore, in this paper, we propose a decentralized framework named RACE: Reinforced Cooperative Autonomous Vehicle Collision AvoidancE. Leveraging a hierarchical architecture we develop an algorithm named Co-DDPG to efficiently train autonomous vehicles. Through a security abiding channel, the autonomous vehicles distribute their driving policies. We use the relative distances obtained by the opponent sensors to build the VANET instead of locations, which ensures the vehicle's location privacy. With a leader-follower architecture and parameter distribution, RACE accelerates the learning of optimal policies and efficiently utilizes the remaining resources. We implement the RACE framework in the widely used TORCS simulator and conduct various experiments to measure the performance of RACE. Evaluations show that RACE quickly learns optimal driving policies and effectively avoids collisions. Moreover, RACE also scales smoothly with varying number of participating vehicles. We further compared RACE with existing autonomous driving systems and show that RACE outperforms them by experiencing 65% less collisions in the training process and exhibits improved performance under varying vehicle density.