 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenign Adversarial Attack: Tricking Algorithm for Goodness
Jul 26, 2021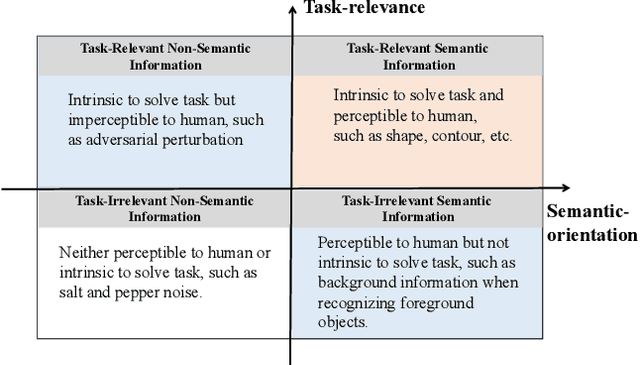


In spite of the successful application in many fields, machine learning algorithms today suffer from notorious problems like vulnerability to adversarial examples. Beyond falling into the cat-and-mouse game between adversarial attack and defense, this paper provides alternative perspective to consider adversarial example and explore whether we can exploit it in benign applications. We first propose a novel taxonomy of visual information along task-relevance and semantic-orientation. The emergence of adversarial example is attributed to algorithm's utilization of task-relevant non-semantic information. While largely ignored in classical machine learning mechanisms, task-relevant non-semantic information enjoys three interesting characteristics as (1) exclusive to algorithm, (2) reflecting common weakness, and (3) utilizable as features. Inspired by this, we present brave new idea called benign adversarial attack to exploit adversarial examples for goodness in three directions: (1) adversarial Turing test, (2) rejecting malicious algorithm, and (3) adversarial data augmentation. Each direction is positioned with motivation elaboration, justification analysis and prototype applications to showcase its potential.
An Experimental Study of Semantic Continuity for Deep Learning Models
Nov 19, 2020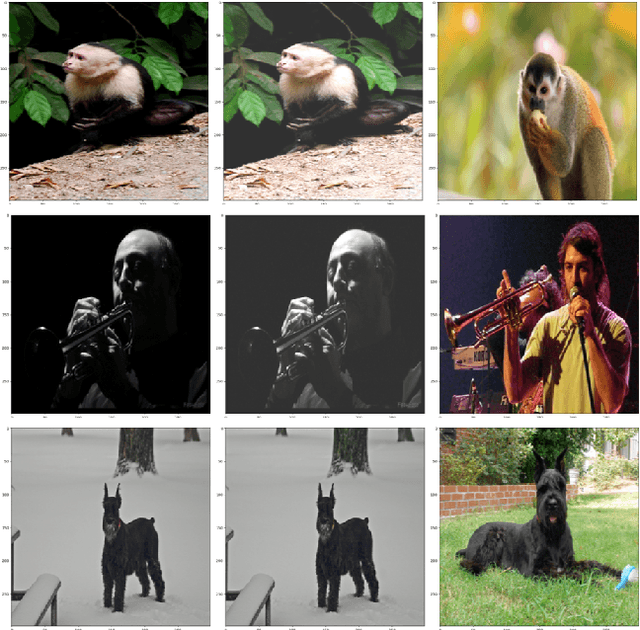
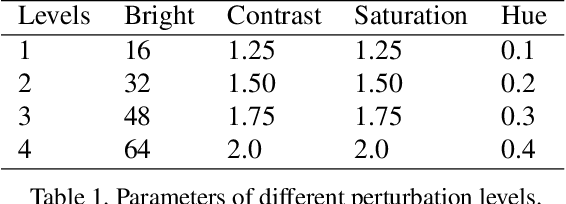
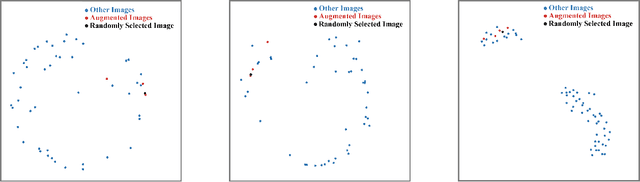
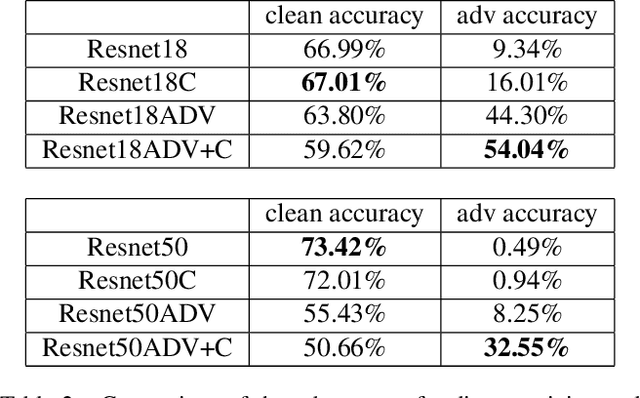
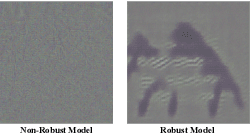
Deep learning models suffer from the problem of semantic discontinuity: small perturbations in the input space tend to cause semantic-level interference to the model output. We argue that the semantic discontinuity results from these inappropriate training targets and contributes to notorious issues such as adversarial robustness, interpretability, etc. We first conduct data analysis to provide evidence of semantic discontinuity in existing deep learning models, and then design a simple semantic continuity constraint which theoretically enables models to obtain smooth gradients and learn semantic-oriented features. Qualitative and quantitative experiments prove that semantically continuous models successfully reduce the use of non-semantic information, which further contributes to the improvement in adversarial robustness, interpretability, model transfer, and machine bias.
MAFF-Net: Filter False Positive for 3D Vehicle Detection with Multi-modal Adaptive Feature Fusion
Sep 23, 2020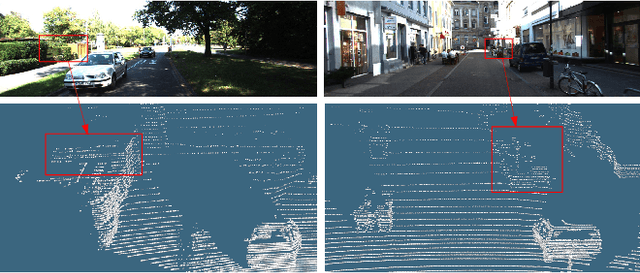

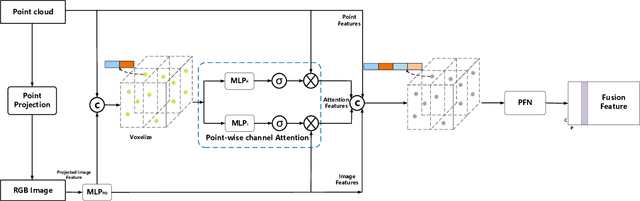
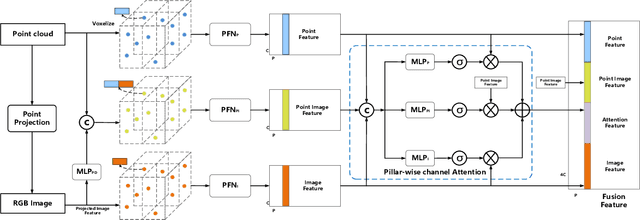
3D vehicle detection based on multi-modal fusion is an important task of many applications such as autonomous driving. Although significant progress has been made, we still observe two aspects that need to be further improvement: First, the specific gain that camera images can bring to 3D detection is seldom explored by previous works. Second, many fusion algorithms run slowly, which is essential for applications with high real-time requirements(autonomous driving). To this end, we propose an end-to-end trainable single-stage multi-modal feature adaptive network in this paper, which uses image information to effectively reduce false positive of 3D detection and has a fast detection speed. A multi-modal adaptive feature fusion module based on channel attention mechanism is proposed to enable the network to adaptively use the feature of each modal. Based on the above mechanism, two fusion technologies are proposed to adapt to different usage scenarios: PointAttentionFusion is suitable for filtering simple false positive and faster; DenseAttentionFusion is suitable for filtering more difficult false positive and has better overall performance. Experimental results on the KITTI dataset demonstrate significant improvement in filtering false positive over the approach using only point cloud data. Furthermore, the proposed method can provide competitive results and has the fastest speed compared to the published state-of-the-art multi-modal methods in the KITTI benchmark.
RangeRCNN: Towards Fast and Accurate 3D Object Detection with Range Image Representation
Sep 01, 2020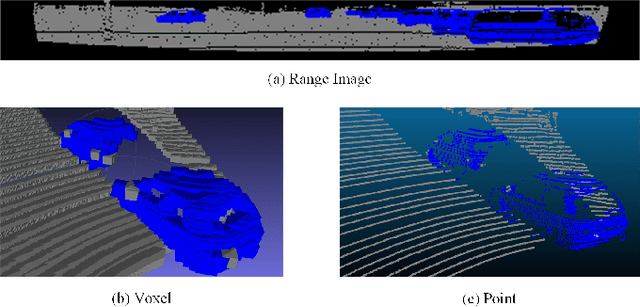
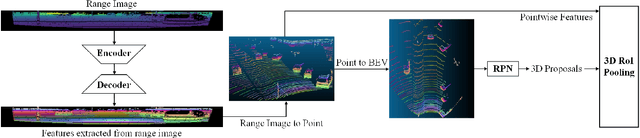
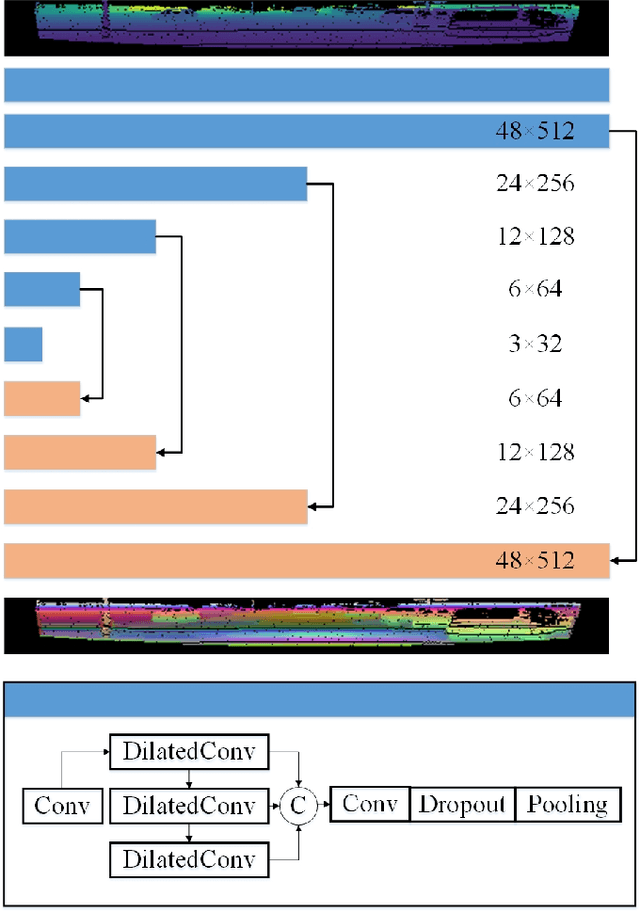
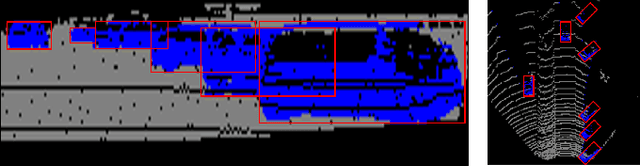
We present RangeRCNN, a novel and effective 3D object detection framework based on the range image representation. Most existing 3D object detection methods are either voxel-based or point-based. Though several optimizations have been introduced to ease the sparsity issue and speed up the running time, the two representations are still computationally inefficient. Compared to these two representations, the range image representation is dense and compact which can exploit the powerful 2D convolution and avoid the uncertain receptive field caused by the sparsity issue. Even so, the range image representation is not preferred in 3D object detection due to the scale variation and occlusion. In this paper, we utilize the dilated residual block to better adapt different object scales and obtain a more flexible receptive field on range image. Considering the scale variation and occlusion of the range image, we propose the RV-PV-BEV~(Range View to Point View to Bird's Eye View) module to transfer the feature from the range view to the bird's eye view. The anchor is defined in the BEV space which avoids the scale variation and occlusion. Both RV and BEV cannot provide enough information for height estimation, so we propose a two-stage RCNN for better 3D detection performance. The point view aforementioned does not only serve as a bridge from RV to BEV but also provides pointwise features for RCNN. Extensive experiments show that the proposed RangeRCNN achieves state-of-the-art performance on the KITTI 3D object detection dataset. We prove that the range image based methods can be effective on the KITTI dataset which provides more possibilities for real-time 3D object detection.
Adversarial Privacy-preserving Filter
Aug 04, 2020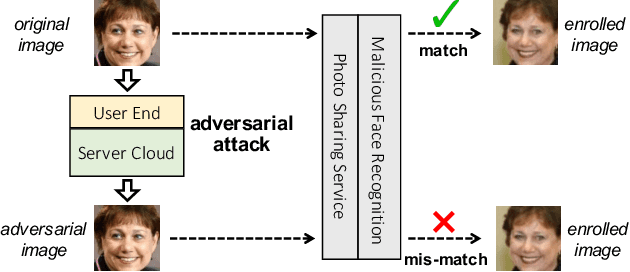

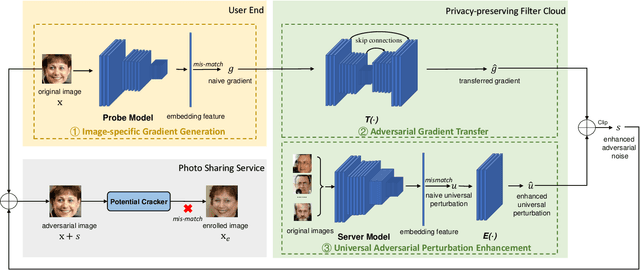
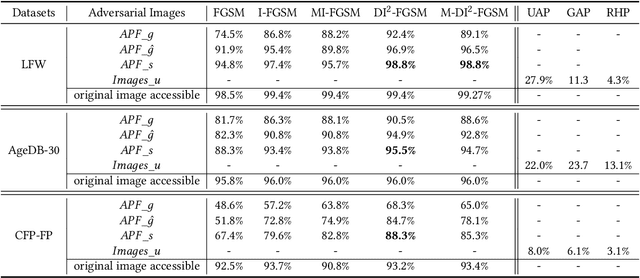
While widely adopted in practical applications, face recognition has been critically discussed regarding the malicious use of face images and the potential privacy problems, e.g., deceiving payment system and causing personal sabotage. Online photo sharing services unintentionally act as the main repository for malicious crawler and face recognition applications. This work aims to develop a privacy-preserving solution, called Adversarial Privacy-preserving Filter (APF), to protect the online shared face images from being maliciously used.We propose an end-cloud collaborated adversarial attack solution to satisfy requirements of privacy, utility and nonaccessibility. Specifically, the solutions consist of three modules: (1) image-specific gradient generation, to extract image-specific gradient in the user end with a compressed probe model; (2) adversarial gradient transfer, to fine-tune the image-specific gradient in the server cloud; and (3) universal adversarial perturbation enhancement, to append image-independent perturbation to derive the final adversarial noise. Extensive experiments on three datasets validate the effectiveness and efficiency of the proposed solution. A prototype application is also released for further evaluation.We hope the end-cloud collaborated attack framework could shed light on addressing the issue of online multimedia sharing privacy-preserving issues from user side.