 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRangeRCNN: Towards Fast and Accurate 3D Object Detection with Range Image Representation
Paper and Code
Sep 01, 2020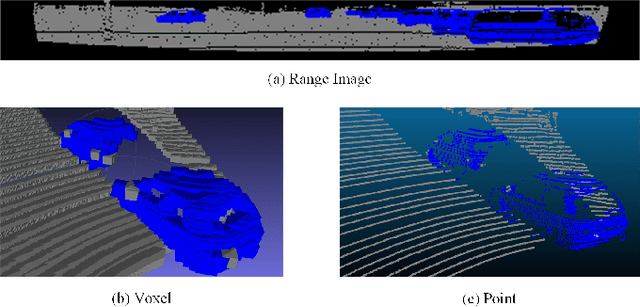
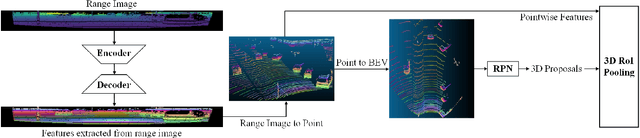
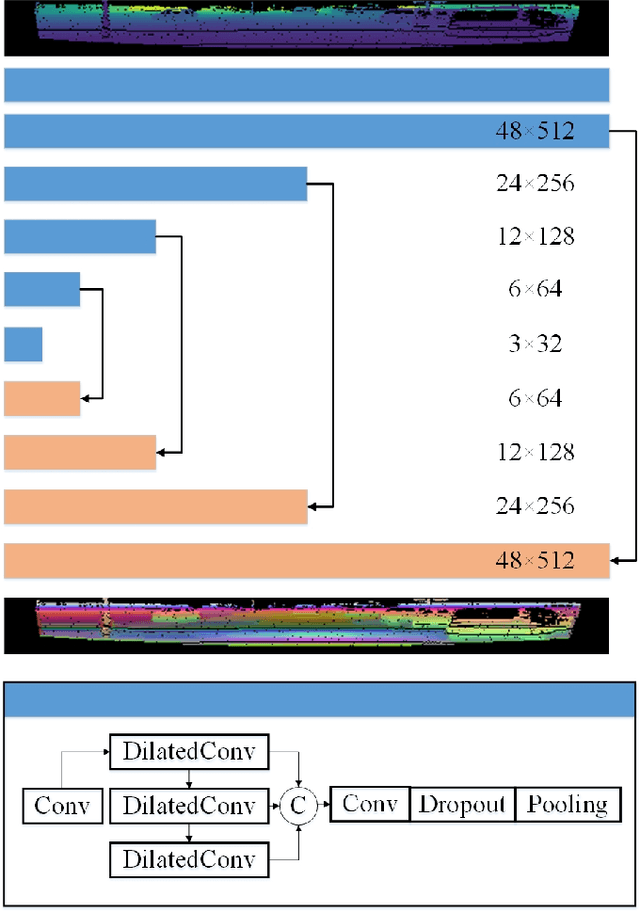
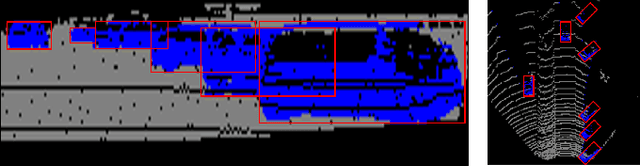
We present RangeRCNN, a novel and effective 3D object detection framework based on the range image representation. Most existing 3D object detection methods are either voxel-based or point-based. Though several optimizations have been introduced to ease the sparsity issue and speed up the running time, the two representations are still computationally inefficient. Compared to these two representations, the range image representation is dense and compact which can exploit the powerful 2D convolution and avoid the uncertain receptive field caused by the sparsity issue. Even so, the range image representation is not preferred in 3D object detection due to the scale variation and occlusion. In this paper, we utilize the dilated residual block to better adapt different object scales and obtain a more flexible receptive field on range image. Considering the scale variation and occlusion of the range image, we propose the RV-PV-BEV~(Range View to Point View to Bird's Eye View) module to transfer the feature from the range view to the bird's eye view. The anchor is defined in the BEV space which avoids the scale variation and occlusion. Both RV and BEV cannot provide enough information for height estimation, so we propose a two-stage RCNN for better 3D detection performance. The point view aforementioned does not only serve as a bridge from RV to BEV but also provides pointwise features for RCNN. Extensive experiments show that the proposed RangeRCNN achieves state-of-the-art performance on the KITTI 3D object detection dataset. We prove that the range image based methods can be effective on the KITTI dataset which provides more possibilities for real-time 3D object detection.