 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarabou 2.0: A Versatile Formal Analyzer of Neural Networks
Jan 25, 2024
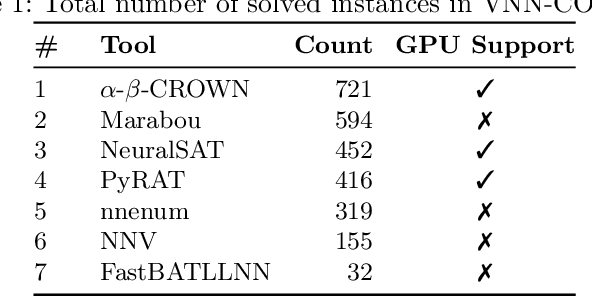

This paper serves as a comprehensive system description of version 2.0 of the Marabou framework for formal analysis of neural networks. We discuss the tool's architectural design and highlight the major features and components introduced since its initial release.
Efficient compilation of expressive problem space specifications to neural network solvers
Jan 24, 2024Recent work has described the presence of the embedding gap in neural network verification. On one side of the gap is a high-level specification about the network's behaviour, written by a domain expert in terms of the interpretable problem space. On the other side are a logically-equivalent set of satisfiability queries, expressed in the uninterpretable embedding space in a form suitable for neural network solvers. In this paper we describe an algorithm for compiling the former to the latter. We explore and overcome complications that arise from targeting neural network solvers as opposed to standard SMT solvers.
Vehicle: Bridging the Embedding Gap in the Verification of Neuro-Symbolic Programs
Jan 12, 2024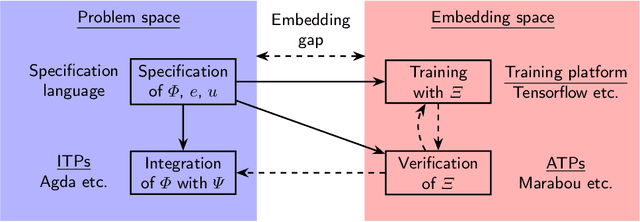


Neuro-symbolic programs -- programs containing both machine learning components and traditional symbolic code -- are becoming increasingly widespread. However, we believe that there is still a lack of a general methodology for verifying these programs whose correctness depends on the behaviour of the machine learning components. In this paper, we identify the ``embedding gap'' -- the lack of techniques for linking semantically-meaningful ``problem-space'' properties to equivalent ``embedding-space'' properties -- as one of the key issues, and describe Vehicle, a tool designed to facilitate the end-to-end verification of neural-symbolic programs in a modular fashion. Vehicle provides a convenient language for specifying ``problem-space'' properties of neural networks and declaring their relationship to the ``embedding-space", and a powerful compiler that automates interpretation of these properties in the language of a chosen machine-learning training environment, neural network verifier, and interactive theorem prover. We demonstrate Vehicle's utility by using it to formally verify the safety of a simple autonomous car equipped with a neural network controller.
Why Robust Natural Language Understanding is a Challenge
Jun 21, 2022
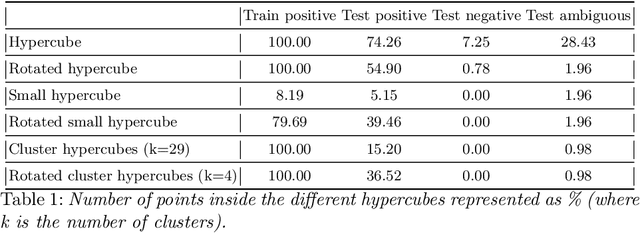

With the proliferation of Deep Machine Learning into real-life applications, a particular property of this technology has been brought to attention: Neural Networks notoriously present low robustness and can be highly sensitive to small input perturbations. Recently, many methods for verifying networks' general properties of robustness have been proposed, but they are mostly applied in Computer Vision. In this paper we propose a Verification method for Natural Language Understanding classification based on larger regions of interest, and we discuss the challenges of such task. We observe that, although the data is almost linearly separable, the verifier does not output positive results and we explain the problems and implications.
Vehicle: Interfacing Neural Network Verifiers with Interactive Theorem Provers
Feb 10, 2022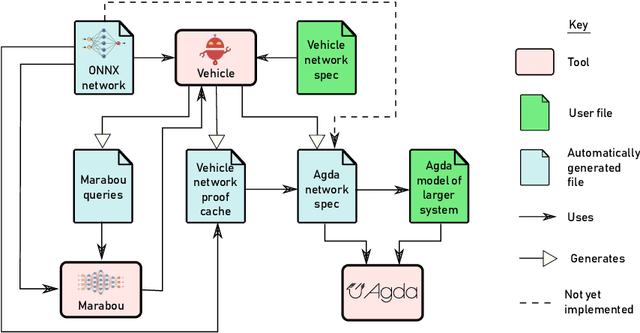
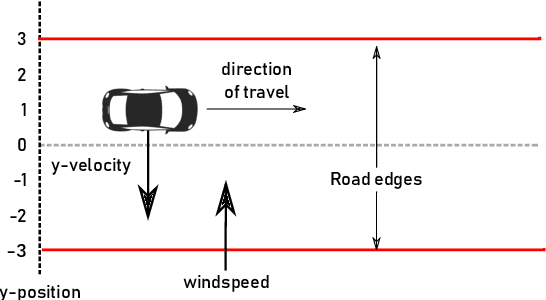
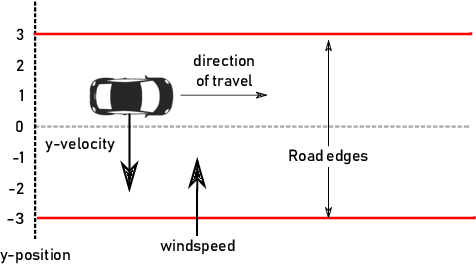
Verification of neural networks is currently a hot topic in automated theorem proving. Progress has been rapid and there are now a wide range of tools available that can verify properties of networks with hundreds of thousands of nodes. In theory this opens the door to the verification of larger control systems that make use of neural network components. However, although work has managed to incorporate the results of these verifiers to prove larger properties of individual systems, there is currently no general methodology for bridging the gap between verifiers and interactive theorem provers (ITPs). In this paper we present Vehicle, our solution to this problem. Vehicle is equipped with an expressive domain specific language for stating neural network specifications which can be compiled to both verifiers and ITPs. It overcomes previous issues with maintainability and scalability in similar ITP formalisations by using a standard ONNX file as the single canonical representation of the network. We demonstrate its utility by using it to connect the neural network verifier Marabou to Agda and then formally verifying that a car steered by a neural network never leaves the road, even in the face of an unpredictable cross wind and imperfect sensors. The network has over 20,000 nodes, and therefore this proof represents an improvement of 3 orders of magnitude over prior proofs about neural network enhanced systems in ITPs.
Property-driven Training: All You Ever Wanted to Know About
Apr 03, 2021
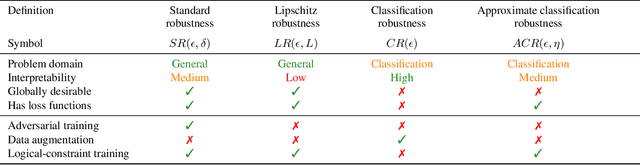


Neural networks are known for their ability to detect general patterns in noisy data. This makes them a popular tool for perception components in complex AI systems. Paradoxically, they are also known for being vulnerable to adversarial attacks. In response, various methods such as adversarial training, data-augmentation and Lipschitz robustness training have been proposed as means of improving their robustness. However, as this paper explores, these training methods each optimise for a different definition of robustness. We perform an in-depth comparison of these different definitions, including their relationship, assumptions, interpretability and verifiability after training. We also look at constraint-driven training, a general approach designed to encode arbitrary constraints, and show that not all of these definitions are directly encodable. Finally we perform experiments to compare the applicability and efficacy of the training methods at ensuring the network obeys these different definitions. These results highlight that even the encoding of such a simple piece of knowledge such as robustness in neural network training is fraught with difficult choices and pitfalls.