 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNever too Cocky to Cooperate: An FIM and RL-based USV-AUV Collaborative System for Underwater Tasks in Extreme Sea Conditions
Apr 21, 2025



This paper develops a novel unmanned surface vehicle (USV)-autonomous underwater vehicle (AUV) collaborative system designed to enhance underwater task performance in extreme sea conditions. The system integrates a dual strategy: (1) high-precision multi-AUV localization enabled by Fisher information matrix-optimized USV path planning, and (2) reinforcement learning-based cooperative planning and control method for multi-AUV task execution. Extensive experimental evaluations in the underwater data collection task demonstrate the system's operational feasibility, with quantitative results showing significant performance improvements over baseline methods. The proposed system exhibits robust coordination capabilities between USV and AUVs while maintaining stability in extreme sea conditions. To facilitate reproducibility and community advancement, we provide an open-source simulation toolkit available at: https://github.com/360ZMEM/USV-AUV-colab .
AxisPose: Model-Free Matching-Free Single-Shot 6D Object Pose Estimation via Axis Generation
Mar 09, 2025



Object pose estimation, which plays a vital role in robotics, augmented reality, and autonomous driving, has been of great interest in computer vision. Existing studies either require multi-stage pose regression or rely on 2D-3D feature matching. Though these approaches have shown promising results, they rely heavily on appearance information, requiring complex input (i.e., multi-view reference input, depth, or CAD models) and intricate pipeline (i.e., feature extraction-SfM-2D to 3D matching-PnP). We propose AxisPose, a model-free, matching-free, single-shot solution for robust 6D pose estimation, which fundamentally diverges from the existing paradigm. Unlike existing methods that rely on 2D-3D or 2D-2D matching using 3D techniques, such as SfM and PnP, AxisPose directly infers a robust 6D pose from a single view by leveraging a diffusion model to learn the latent axis distribution of objects without reference views. Specifically, AxisPose constructs an Axis Generation Module (AGM) to capture the latent geometric distribution of object axes through a diffusion model. The diffusion process is guided by injecting the gradient of geometric consistency loss into the noise estimation to maintain the geometric consistency of the generated tri-axis. With the generated tri-axis projection, AxisPose further adopts a Triaxial Back-projection Module (TBM) to recover the 6D pose from the object tri-axis. The proposed AxisPose achieves robust performance at the cross-instance level (i.e., one model for N instances) using only a single view as input without reference images, with great potential for generalization to unseen-object level.
Scalable attribute-aware network embedding with locality
Apr 30, 2018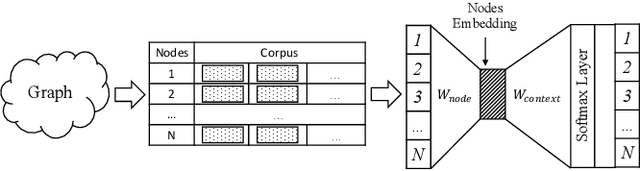

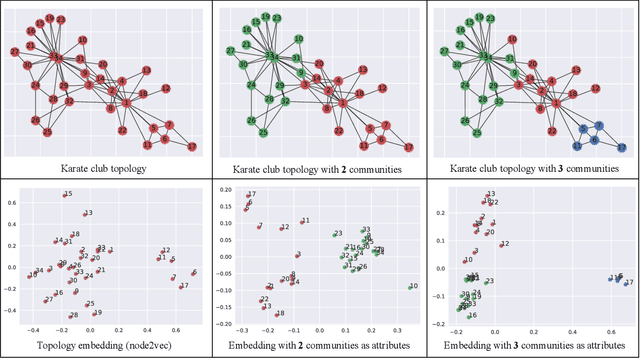
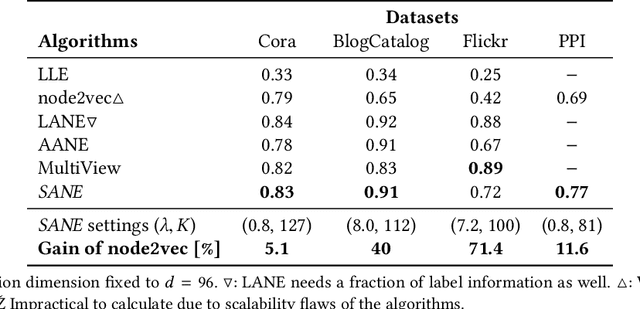
Adding attributes for nodes to network embedding helps to improve the ability of the learned joint representation to depict features from topology and attributes simultaneously. Recent research on the joint embedding has exhibited a promising performance on a variety of tasks by jointly embedding the two spaces. However, due to the indispensable requirement of globality based information, present approaches contain a flaw of in-scalability. Here we propose \emph{SANE}, a scalable attribute-aware network embedding algorithm with locality, to learn the joint representation from topology and attributes. By enforcing the alignment of a local linear relationship between each node and its K-nearest neighbors in topology and attribute space, the joint embedding representations are more informative comparing with a single representation from topology or attributes alone. And we argue that the locality in \emph{SANE} is the key to learning the joint representation at scale. By using several real-world networks from diverse domains, We demonstrate the efficacy of \emph{SANE} in performance and scalability aspect. Overall, for performance on label classification, SANE successfully reaches up to the highest F1-score on most datasets, and even closer to the baseline method that needs label information as extra inputs, compared with other state-of-the-art joint representation algorithms. What's more, \emph{SANE} has an up to 71.4\% performance gain compared with the single topology-based algorithm. For scalability, we have demonstrated the linearly time complexity of \emph{SANE}. In addition, we intuitively observe that when the network size scales to 100,000 nodes, the "learning joint embedding" step of \emph{SANE} only takes $\approx10$ seconds.
Learning Graph Topological Features via GAN
Sep 13, 2017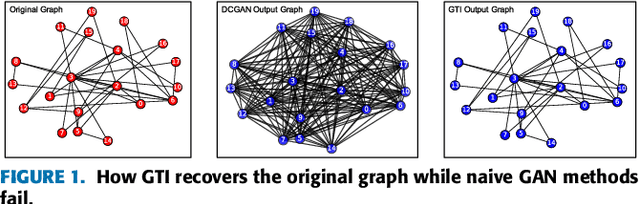
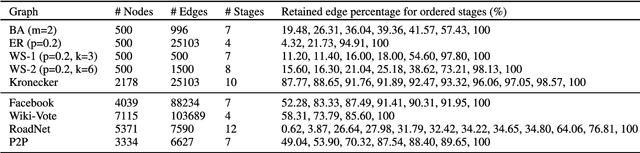
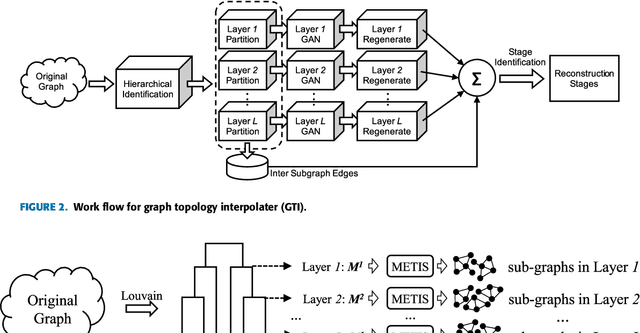

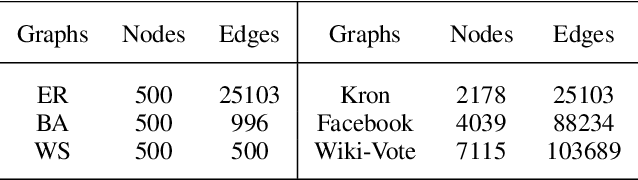
Inspired by the generation power of generative adversarial networks (GANs) in image domains, we introduce a novel hierarchical architecture for learning characteristic topological features from a single arbitrary input graph via GANs. The hierarchical architecture consisting of multiple GANs preserves both local and global topological features and automatically partitions the input graph into representative stages for feature learning. The stages facilitate reconstruction and can be used as indicators of the importance of the associated topological structures. Experiments show that our method produces subgraphs retaining a wide range of topological features, even in early reconstruction stages (unlike a single GAN, which cannot easily identify such features, let alone reconstruct the original graph). This paper is firstline research on combining the use of GANs and graph topological analysis.
Can GAN Learn Topological Features of a Graph?
Jul 19, 2017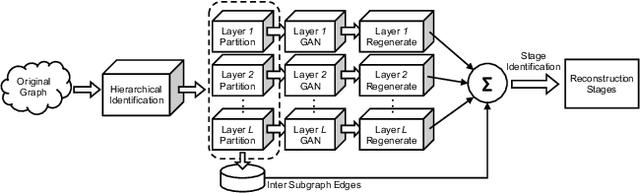
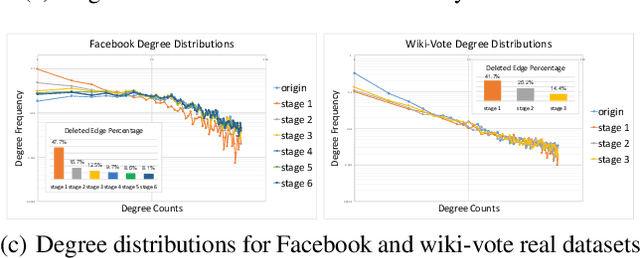
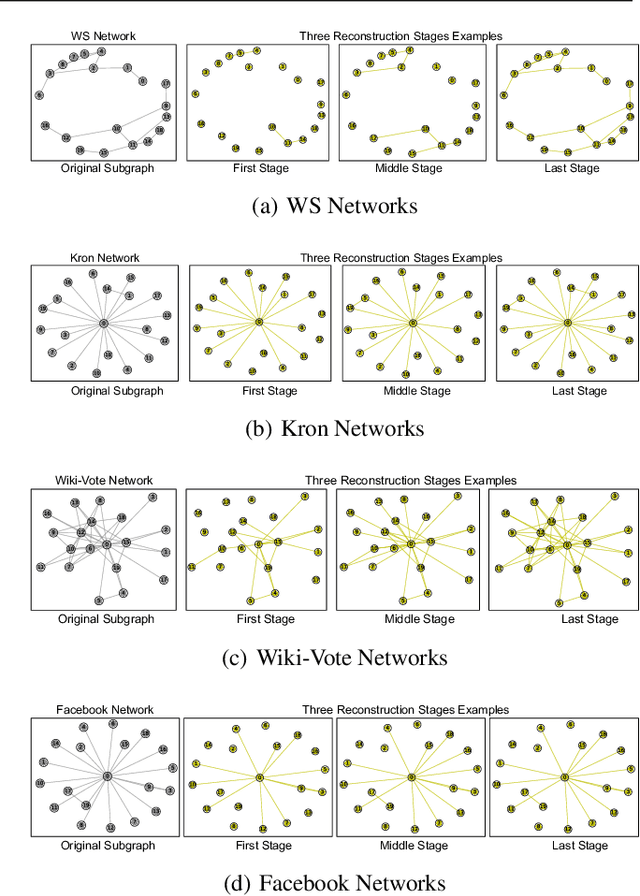
This paper is first-line research expanding GANs into graph topology analysis. By leveraging the hierarchical connectivity structure of a graph, we have demonstrated that generative adversarial networks (GANs) can successfully capture topological features of any arbitrary graph, and rank edge sets by different stages according to their contribution to topology reconstruction. Moreover, in addition to acting as an indicator of graph reconstruction, we find that these stages can also preserve important topological features in a graph.