 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARE-PD: A Multi-Site Anonymized Clinical Dataset for Parkinson's Disease Gait Assessment
Oct 05, 2025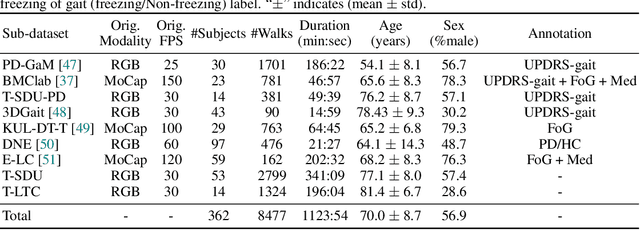
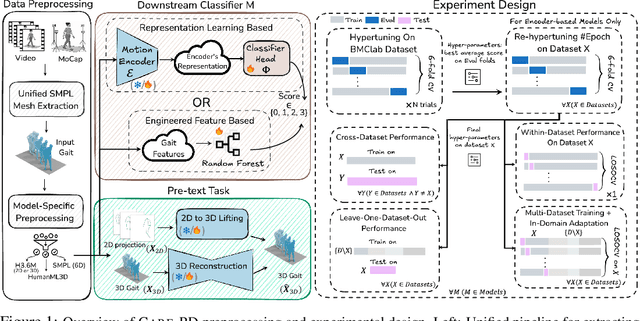
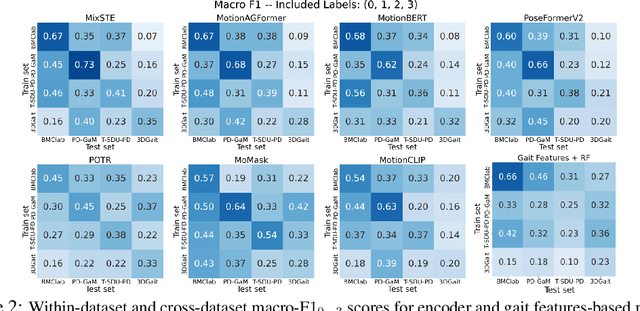
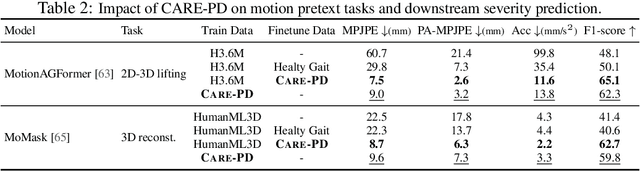
Objective gait assessment in Parkinson's Disease (PD) is limited by the absence of large, diverse, and clinically annotated motion datasets. We introduce CARE-PD, the largest publicly available archive of 3D mesh gait data for PD, and the first multi-site collection spanning 9 cohorts from 8 clinical centers. All recordings (RGB video or motion capture) are converted into anonymized SMPL meshes via a harmonized preprocessing pipeline. CARE-PD supports two key benchmarks: supervised clinical score prediction (estimating Unified Parkinson's Disease Rating Scale, UPDRS, gait scores) and unsupervised motion pretext tasks (2D-to-3D keypoint lifting and full-body 3D reconstruction). Clinical prediction is evaluated under four generalization protocols: within-dataset, cross-dataset, leave-one-dataset-out, and multi-dataset in-domain adaptation. To assess clinical relevance, we compare state-of-the-art motion encoders with a traditional gait-feature baseline, finding that encoders consistently outperform handcrafted features. Pretraining on CARE-PD reduces MPJPE (from 60.8mm to 7.5mm) and boosts PD severity macro-F1 by 17 percentage points, underscoring the value of clinically curated, diverse training data. CARE-PD and all benchmark code are released for non-commercial research at https://neurips2025.care-pd.ca/.
GAITGen: Disentangled Motion-Pathology Impaired Gait Generative Model -- Bringing Motion Generation to the Clinical Domain
Mar 28, 2025Gait analysis is crucial for the diagnosis and monitoring of movement disorders like Parkinson's Disease. While computer vision models have shown potential for objectively evaluating parkinsonian gait, their effectiveness is limited by scarce clinical datasets and the challenge of collecting large and well-labelled data, impacting model accuracy and risk of bias. To address these gaps, we propose GAITGen, a novel framework that generates realistic gait sequences conditioned on specified pathology severity levels. GAITGen employs a Conditional Residual Vector Quantized Variational Autoencoder to learn disentangled representations of motion dynamics and pathology-specific factors, coupled with Mask and Residual Transformers for conditioned sequence generation. GAITGen generates realistic, diverse gait sequences across severity levels, enriching datasets and enabling large-scale model training in parkinsonian gait analysis. Experiments on our new PD-GaM (real) dataset demonstrate that GAITGen outperforms adapted state-of-the-art models in both reconstruction fidelity and generation quality, accurately capturing critical pathology-specific gait features. A clinical user study confirms the realism and clinical relevance of our generated sequences. Moreover, incorporating GAITGen-generated data into downstream tasks improves parkinsonian gait severity estimation, highlighting its potential for advancing clinical gait analysis.
Benchmarking Skeleton-based Motion Encoder Models for Clinical Applications: Estimating Parkinson's Disease Severity in Walking Sequences
May 28, 2024



This study investigates the application of general human motion encoders trained on large-scale human motion datasets for analyzing gait patterns in PD patients. Although these models have learned a wealth of human biomechanical knowledge, their effectiveness in analyzing pathological movements, such as parkinsonian gait, has yet to be fully validated. We propose a comparative framework and evaluate six pre-trained state-of-the-art human motion encoder models on their ability to predict the Movement Disorder Society - Unified Parkinson's Disease Rating Scale (MDS-UPDRS-III) gait scores from motion capture data. We compare these against a traditional gait feature-based predictive model in a recently released large public PD dataset, including PD patients on and off medication. The feature-based model currently shows higher weighted average accuracy, precision, recall, and F1-score. Motion encoder models with closely comparable results demonstrate promise for scalability and efficiency in clinical settings. This potential is underscored by the enhanced performance of the encoder model upon fine-tuning on PD training set. Four of the six human motion models examined provided prediction scores that were significantly different between on- and off-medication states. This finding reveals the sensitivity of motion encoder models to nuanced clinical changes. It also underscores the necessity for continued customization of these models to better capture disease-specific features, thereby reducing the reliance on labor-intensive feature engineering. Lastly, we establish a benchmark for the analysis of skeleton-based motion encoder models in clinical settings. To the best of our knowledge, this is the first study to provide a benchmark that enables state-of-the-art models to be tested and compete in a clinical context. Codes and benchmark leaderboard are available at code.
MotionAGFormer: Enhancing 3D Human Pose Estimation with a Transformer-GCNFormer Network
Oct 25, 2023



Recent transformer-based approaches have demonstrated excellent performance in 3D human pose estimation. However, they have a holistic view and by encoding global relationships between all the joints, they do not capture the local dependencies precisely. In this paper, we present a novel Attention-GCNFormer (AGFormer) block that divides the number of channels by using two parallel transformer and GCNFormer streams. Our proposed GCNFormer module exploits the local relationship between adjacent joints, outputting a new representation that is complementary to the transformer output. By fusing these two representation in an adaptive way, AGFormer exhibits the ability to better learn the underlying 3D structure. By stacking multiple AGFormer blocks, we propose MotionAGFormer in four different variants, which can be chosen based on the speed-accuracy trade-off. We evaluate our model on two popular benchmark datasets: Human3.6M and MPI-INF-3DHP. MotionAGFormer-B achieves state-of-the-art results, with P1 errors of 38.4mm and 16.2mm, respectively. Remarkably, it uses a quarter of the parameters and is three times more computationally efficient than the previous leading model on Human3.6M dataset. Code and models are available at https://github.com/TaatiTeam/MotionAGFormer.
Pose2Gait: Extracting Gait Features from Monocular Video of Individuals with Dementia
Aug 22, 2023



Video-based ambient monitoring of gait for older adults with dementia has the potential to detect negative changes in health and allow clinicians and caregivers to intervene early to prevent falls or hospitalizations. Computer vision-based pose tracking models can process video data automatically and extract joint locations; however, publicly available models are not optimized for gait analysis on older adults or clinical populations. In this work we train a deep neural network to map from a two dimensional pose sequence, extracted from a video of an individual walking down a hallway toward a wall-mounted camera, to a set of three-dimensional spatiotemporal gait features averaged over the walking sequence. The data of individuals with dementia used in this work was captured at two sites using a wall-mounted system to collect the video and depth information used to train and evaluate our model. Our Pose2Gait model is able to extract velocity and step length values from the video that are correlated with the features from the depth camera, with Spearman's correlation coefficients of .83 and .60 respectively, showing that three dimensional spatiotemporal features can be predicted from monocular video. Future work remains to improve the accuracy of other features, such as step time and step width, and test the utility of the predicted values for detecting meaningful changes in gait during longitudinal ambient monitoring.
TRiPOD: Human Trajectory and Pose Dynamics Forecasting in the Wild
Apr 08, 2021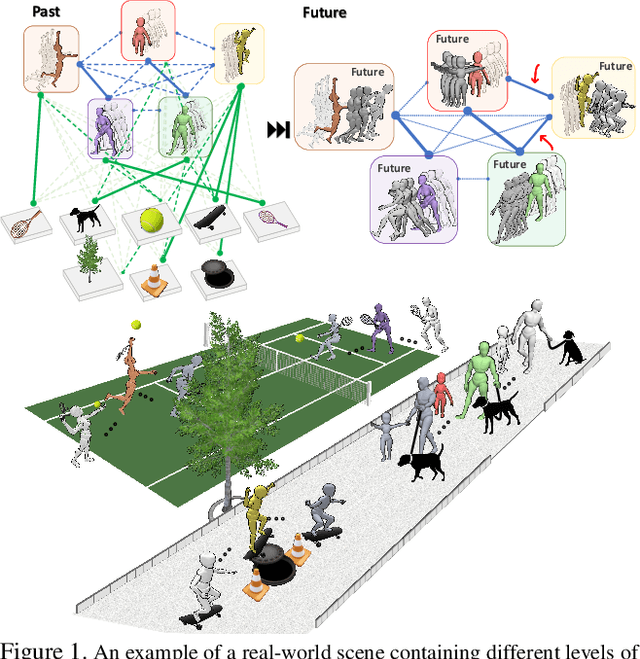
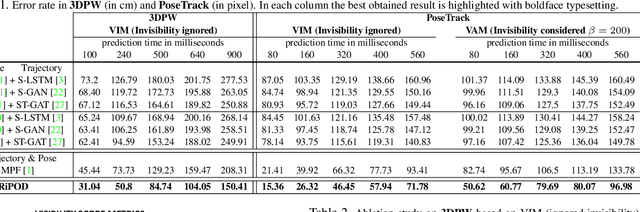
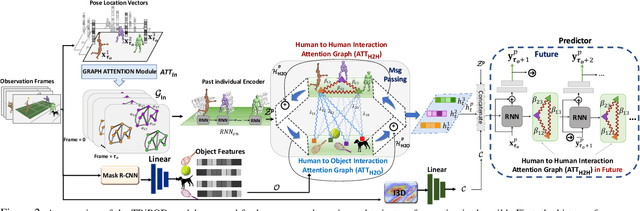
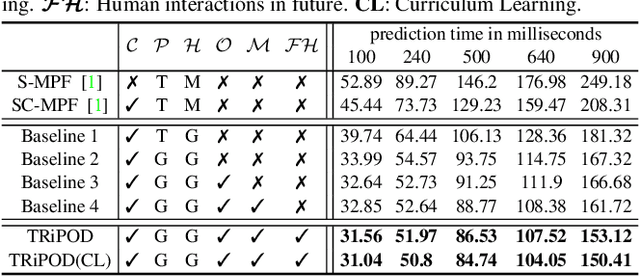
Joint forecasting of human trajectory and pose dynamics is a fundamental building block of various applications ranging from robotics and autonomous driving to surveillance systems. Predicting body dynamics requires capturing subtle information embedded in the humans' interactions with each other and with the objects present in the scene. In this paper, we propose a novel TRajectory and POse Dynamics (nicknamed TRiPOD) method based on graph attentional networks to model the human-human and human-object interactions both in the input space and the output space (decoded future output). The model is supplemented by a message passing interface over the graphs to fuse these different levels of interactions efficiently. Furthermore, to incorporate a real-world challenge, we propound to learn an indicator representing whether an estimated body joint is visible/invisible at each frame, e.g. due to occlusion or being outside the sensor field of view. Finally, we introduce a new benchmark for this joint task based on two challenging datasets (PoseTrack and 3DPW) and propose evaluation metrics to measure the effectiveness of predictions in the global space, even when there are invisible cases of joints. Our evaluation shows that TRiPOD outperforms all prior work and state-of-the-art specifically designed for each of the trajectory and pose forecasting tasks.
Socially and Contextually Aware Human Motion and Pose Forecasting
Jul 14, 2020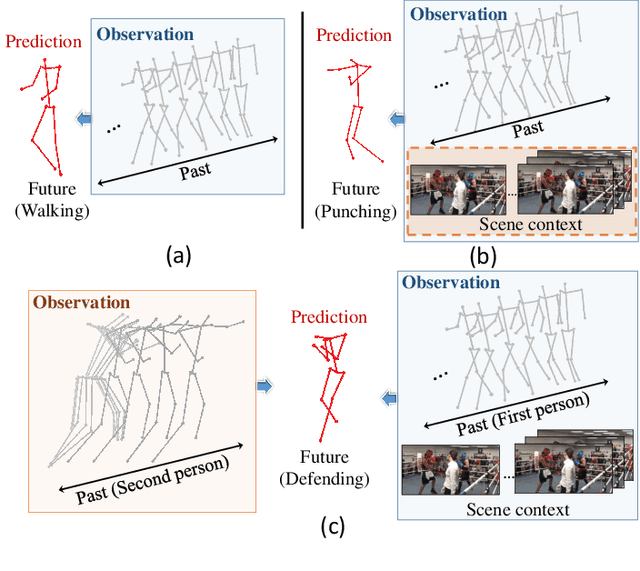
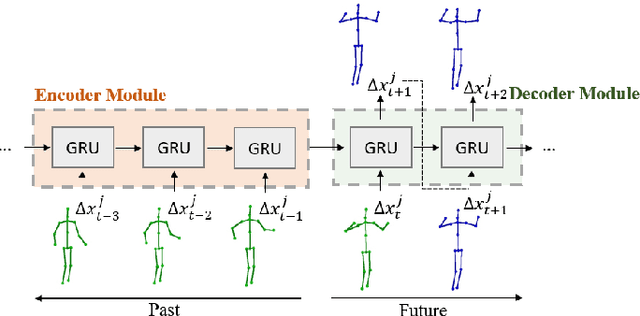
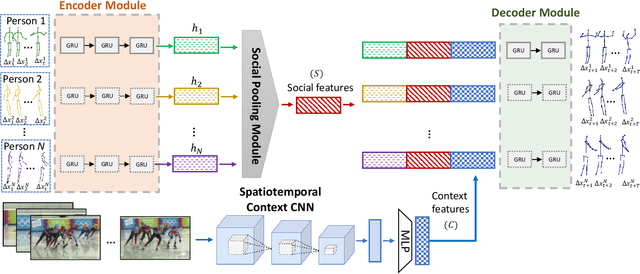
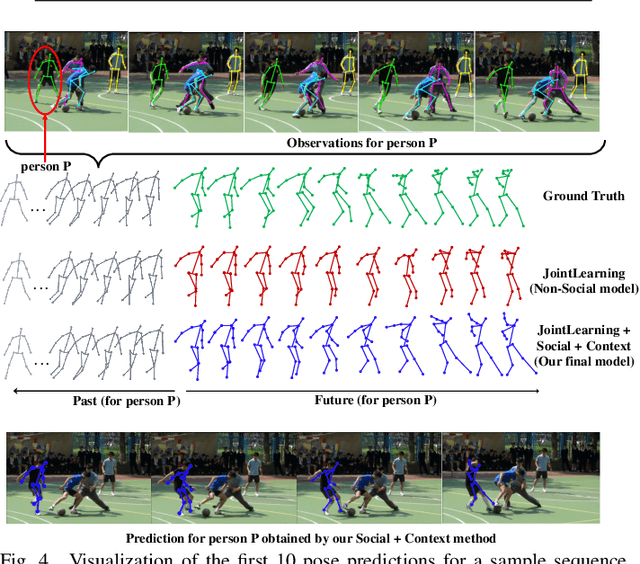
Smooth and seamless robot navigation while interacting with humans depends on predicting human movements. Forecasting such human dynamics often involves modeling human trajectories (global motion) or detailed body joint movements (local motion). Prior work typically tackled local and global human movements separately. In this paper, we propose a novel framework to tackle both tasks of human motion (or trajectory) and body skeleton pose forecasting in a unified end-to-end pipeline. To deal with this real-world problem, we consider incorporating both scene and social contexts, as critical clues for this prediction task, into our proposed framework. To this end, we first couple these two tasks by i) encoding their history using a shared Gated Recurrent Unit (GRU) encoder and ii) applying a metric as loss, which measures the source of errors in each task jointly as a single distance. Then, we incorporate the scene context by encoding a spatio-temporal representation of the video data. We also include social clues by generating a joint feature representation from motion and pose of all individuals from the scene using a social pooling layer. Finally, we use a GRU based decoder to forecast both motion and skeleton pose. We demonstrate that our proposed framework achieves a superior performance compared to several baselines on two social datasets.