 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni$\textbf{F}^2$ace: Fine-grained Face Understanding and Generation with Unified Multimodal Models
Mar 11, 2025

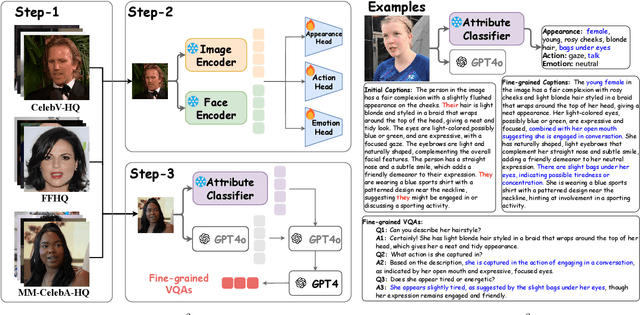
Unified multimodal models (UMMs) have emerged as a powerful paradigm in foundational computer vision research, demonstrating significant potential in both image understanding and generation. However, existing research in the face domain primarily focuses on $\textbf{coarse}$ facial attribute understanding, with limited capacity to handle $\textbf{fine-grained}$ facial attributes and without addressing generation capabilities. To overcome these limitations, we propose Uni$\textbf{F}^2$ace, the first UMM tailored specifically for fine-grained face understanding and generation. In general, we train Uni$\textbf{F}^2$ace on a self-constructed, specialized dataset utilizing two mutually beneficial diffusion techniques and a two-level mixture-of-experts architecture. Specifically, we first build a large-scale facial dataset, Uni$\textbf{F}^2$ace-130K, which contains 130K image-text pairs with one million question-answering pairs that span a wide range of facial attributes. Second, we establish a theoretical connection between discrete diffusion score matching and masked generative models, optimizing both evidence lower bounds simultaneously, which significantly improves the model's ability to synthesize facial details. Finally, we introduce both token-level and sequence-level mixture-of-experts, enabling efficient fine-grained representation learning for both understanding and generation tasks. Extensive experiments on Uni$\textbf{F}^2$ace-130K demonstrate that Uni$\textbf{F}^2$ace outperforms existing UMMs and generative models, achieving superior performance across both understanding and generation tasks.
MobiFuse: A High-Precision On-device Depth Perception System with Multi-Data Fusion
Dec 18, 2024



We present MobiFuse, a high-precision depth perception system on mobile devices that combines dual RGB and Time-of-Flight (ToF) cameras. To achieve this, we leverage physical principles from various environmental factors to propose the Depth Error Indication (DEI) modality, characterizing the depth error of ToF and stereo-matching. Furthermore, we employ a progressive fusion strategy, merging geometric features from ToF and stereo depth maps with depth error features from the DEI modality to create precise depth maps. Additionally, we create a new ToF-Stereo depth dataset, RealToF, to train and validate our model. Our experiments demonstrate that MobiFuse excels over baselines by significantly reducing depth measurement errors by up to 77.7%. It also showcases strong generalization across diverse datasets and proves effectiveness in two downstream tasks: 3D reconstruction and 3D segmentation. The demo video of MobiFuse in real-life scenarios is available at the de-identified YouTube link(https://youtu.be/jy-Sp7T1LVs).