 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe RoboSense Challenge: Sense Anything, Navigate Anywhere, Adapt Across Platforms
Jan 08, 2026Autonomous systems are increasingly deployed in open and dynamic environments -- from city streets to aerial and indoor spaces -- where perception models must remain reliable under sensor noise, environmental variation, and platform shifts. However, even state-of-the-art methods often degrade under unseen conditions, highlighting the need for robust and generalizable robot sensing. The RoboSense 2025 Challenge is designed to advance robustness and adaptability in robot perception across diverse sensing scenarios. It unifies five complementary research tracks spanning language-grounded decision making, socially compliant navigation, sensor configuration generalization, cross-view and cross-modal correspondence, and cross-platform 3D perception. Together, these tasks form a comprehensive benchmark for evaluating real-world sensing reliability under domain shifts, sensor failures, and platform discrepancies. RoboSense 2025 provides standardized datasets, baseline models, and unified evaluation protocols, enabling large-scale and reproducible comparison of robust perception methods. The challenge attracted 143 teams from 85 institutions across 16 countries, reflecting broad community engagement. By consolidating insights from 23 winning solutions, this report highlights emerging methodological trends, shared design principles, and open challenges across all tracks, marking a step toward building robots that can sense reliably, act robustly, and adapt across platforms in real-world environments.
Vision-Language-Action Models for Autonomous Driving: Past, Present, and Future
Dec 18, 2025Autonomous driving has long relied on modular "Perception-Decision-Action" pipelines, where hand-crafted interfaces and rule-based components often break down in complex or long-tailed scenarios. Their cascaded design further propagates perception errors, degrading downstream planning and control. Vision-Action (VA) models address some limitations by learning direct mappings from visual inputs to actions, but they remain opaque, sensitive to distribution shifts, and lack structured reasoning or instruction-following capabilities. Recent progress in Large Language Models (LLMs) and multimodal learning has motivated the emergence of Vision-Language-Action (VLA) frameworks, which integrate perception with language-grounded decision making. By unifying visual understanding, linguistic reasoning, and actionable outputs, VLAs offer a pathway toward more interpretable, generalizable, and human-aligned driving policies. This work provides a structured characterization of the emerging VLA landscape for autonomous driving. We trace the evolution from early VA approaches to modern VLA frameworks and organize existing methods into two principal paradigms: End-to-End VLA, which integrates perception, reasoning, and planning within a single model, and Dual-System VLA, which separates slow deliberation (via VLMs) from fast, safety-critical execution (via planners). Within these paradigms, we further distinguish subclasses such as textual vs. numerical action generators and explicit vs. implicit guidance mechanisms. We also summarize representative datasets and benchmarks for evaluating VLA-based driving systems and highlight key challenges and open directions, including robustness, interpretability, and instruction fidelity. Overall, this work aims to establish a coherent foundation for advancing human-compatible autonomous driving systems.
Visual Grounding from Event Cameras
Sep 11, 2025Event cameras capture changes in brightness with microsecond precision and remain reliable under motion blur and challenging illumination, offering clear advantages for modeling highly dynamic scenes. Yet, their integration with natural language understanding has received little attention, leaving a gap in multimodal perception. To address this, we introduce Talk2Event, the first large-scale benchmark for language-driven object grounding using event data. Built on real-world driving scenarios, Talk2Event comprises 5,567 scenes, 13,458 annotated objects, and more than 30,000 carefully validated referring expressions. Each expression is enriched with four structured attributes -- appearance, status, relation to the viewer, and relation to surrounding objects -- that explicitly capture spatial, temporal, and relational cues. This attribute-centric design supports interpretable and compositional grounding, enabling analysis that moves beyond simple object recognition to contextual reasoning in dynamic environments. We envision Talk2Event as a foundation for advancing multimodal and temporally-aware perception, with applications spanning robotics, human-AI interaction, and so on.
Talk2Event: Grounded Understanding of Dynamic Scenes from Event Cameras
Jul 23, 2025Event cameras offer microsecond-level latency and robustness to motion blur, making them ideal for understanding dynamic environments. Yet, connecting these asynchronous streams to human language remains an open challenge. We introduce Talk2Event, the first large-scale benchmark for language-driven object grounding in event-based perception. Built from real-world driving data, we provide over 30,000 validated referring expressions, each enriched with four grounding attributes -- appearance, status, relation to viewer, and relation to other objects -- bridging spatial, temporal, and relational reasoning. To fully exploit these cues, we propose EventRefer, an attribute-aware grounding framework that dynamically fuses multi-attribute representations through a Mixture of Event-Attribute Experts (MoEE). Our method adapts to different modalities and scene dynamics, achieving consistent gains over state-of-the-art baselines in event-only, frame-only, and event-frame fusion settings. We hope our dataset and approach will establish a foundation for advancing multimodal, temporally-aware, and language-driven perception in real-world robotics and autonomy.
Stairway to Success: Zero-Shot Floor-Aware Object-Goal Navigation via LLM-Driven Coarse-to-Fine Exploration
May 29, 2025Object-Goal Navigation (OGN) remains challenging in real-world, multi-floor environments and under open-vocabulary object descriptions. We observe that most episodes in widely used benchmarks such as HM3D and MP3D involve multi-floor buildings, with many requiring explicit floor transitions. However, existing methods are often limited to single-floor settings or predefined object categories. To address these limitations, we tackle two key challenges: (1) efficient cross-level planning and (2) zero-shot object-goal navigation (ZS-OGN), where agents must interpret novel object descriptions without prior exposure. We propose ASCENT, a framework that combines a Multi-Floor Spatial Abstraction module for hierarchical semantic mapping and a Coarse-to-Fine Frontier Reasoning module leveraging Large Language Models (LLMs) for context-aware exploration, without requiring additional training on new object semantics or locomotion data. Our method outperforms state-of-the-art ZS-OGN approaches on HM3D and MP3D benchmarks while enabling efficient multi-floor navigation. We further validate its practicality through real-world deployment on a quadruped robot, achieving successful object exploration across unseen floors.
Dragtraffic: A Non-Expert Interactive and Point-Based Controllable Traffic Scene Generation Framework
Apr 19, 2024
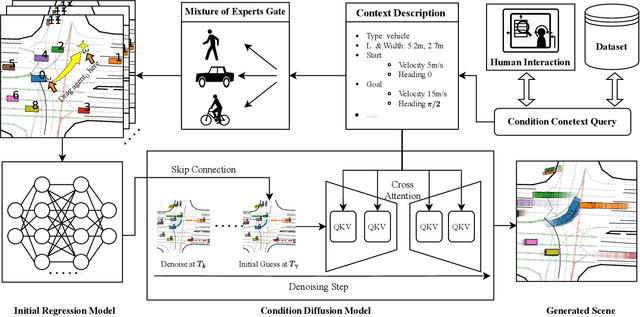


The evaluation and training of autonomous driving systems require diverse and scalable corner cases. However, most existing scene generation methods lack controllability, accuracy, and versatility, resulting in unsatisfactory generation results. To address this problem, we propose Dragtraffic, a generalized, point-based, and controllable traffic scene generation framework based on conditional diffusion. Dragtraffic enables non-experts to generate a variety of realistic driving scenarios for different types of traffic agents through an adaptive mixture expert architecture. We use a regression model to provide a general initial solution and a refinement process based on the conditional diffusion model to ensure diversity. User-customized context is introduced through cross-attention to ensure high controllability. Experiments on a real-world driving dataset show that Dragtraffic outperforms existing methods in terms of authenticity, diversity, and freedom.
DHP-Mapping: A Dense Panoptic Mapping System with Hierarchical World Representation and Label Optimization Techniques
Mar 25, 2024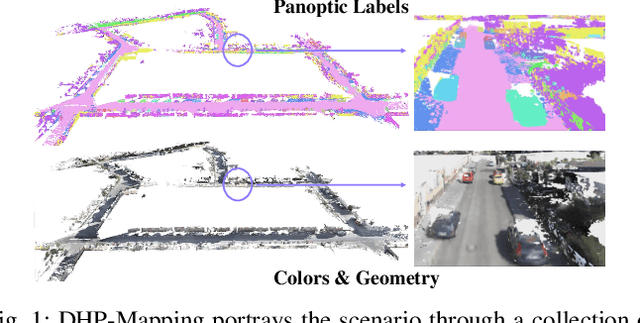
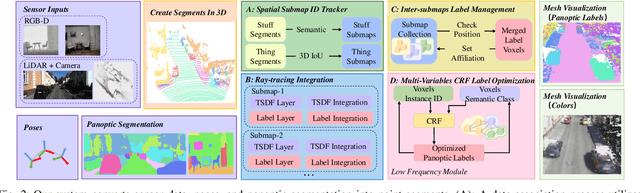
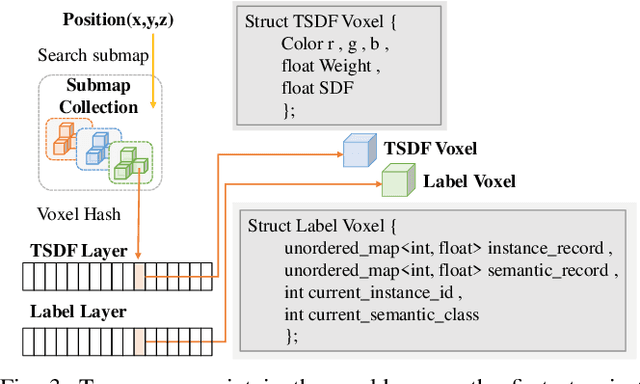
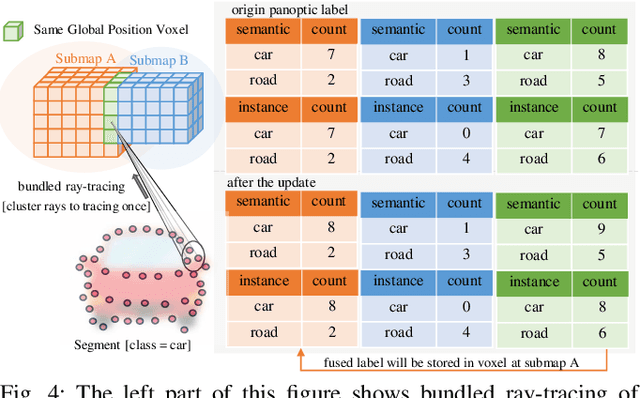
Maps provide robots with crucial environmental knowledge, thereby enabling them to perform interactive tasks effectively. Easily accessing accurate abstract-to-detailed geometric and semantic concepts from maps is crucial for robots to make informed and efficient decisions. To comprehensively model the environment and effectively manage the map data structure, we propose DHP-Mapping, a dense mapping system that utilizes multiple Truncated Signed Distance Field (TSDF) submaps and panoptic labels to hierarchically model the environment. The output map is able to maintain both voxel- and submap-level metric and semantic information. Two modules are presented to enhance the mapping efficiency and label consistency: (1) an inter-submaps label fusion strategy to eliminate duplicate points across submaps and (2) a conditional random field (CRF) based approach to enhance panoptic labels through object label comprehension and contextual information. We conducted experiments with two public datasets including indoor and outdoor scenarios. Our system performs comparably to state-of-the-art (SOTA) methods across geometry and label accuracy evaluation metrics. The experiment results highlight the effectiveness and scalability of our system, as it is capable of constructing precise geometry and maintaining consistent panoptic labels. Our code is publicly available at https://github.com/hutslib/DHP-Mapping.
FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms
Aug 25, 2022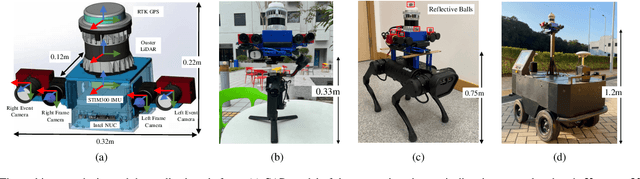
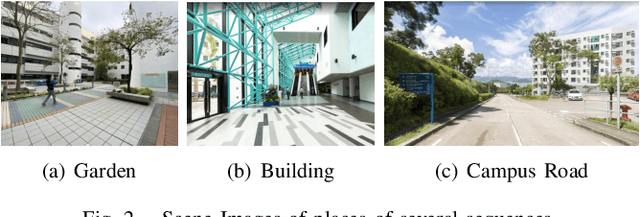
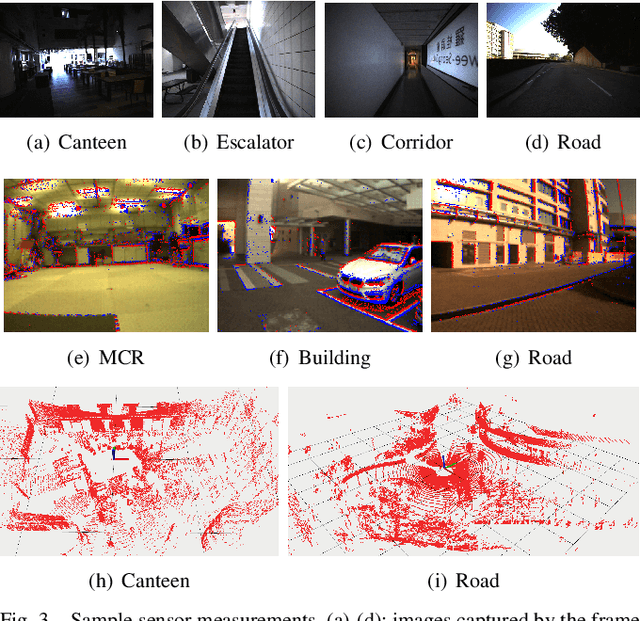
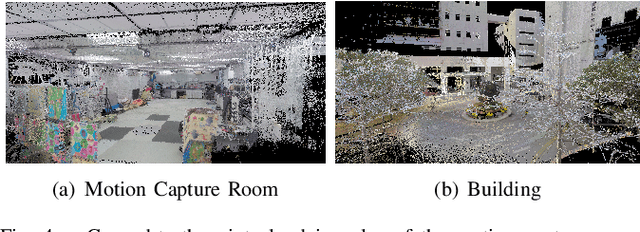
Combining multiple sensors enables a robot to maximize its perceptual awareness of environments and enhance its robustness to external disturbance, crucial to robotic navigation. This paper proposes the FusionPortable benchmark, a complete multi-sensor dataset with a diverse set of sequences for mobile robots. This paper presents three contributions. We first advance a portable and versatile multi-sensor suite that offers rich sensory measurements: 10Hz LiDAR point clouds, 20Hz stereo frame images, high-rate and asynchronous events from stereo event cameras, 200Hz inertial readings from an IMU, and 10Hz GPS signal. Sensors are already temporally synchronized in hardware. This device is lightweight, self-contained, and has plug-and-play support for mobile robots. Second, we construct a dataset by collecting 17 sequences that cover a variety of environments on the campus by exploiting multiple robot platforms for data collection. Some sequences are challenging to existing SLAM algorithms. Third, we provide ground truth for the decouple localization and mapping performance evaluation. We additionally evaluate state-of-the-art SLAM approaches and identify their limitations. The dataset, consisting of raw sensor easurements, ground truth, calibration data, and evaluated algorithms, will be released: https://ram-lab.com/file/site/multi-sensor-dataset.