 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDragtraffic: A Non-Expert Interactive and Point-Based Controllable Traffic Scene Generation Framework
Paper and Code

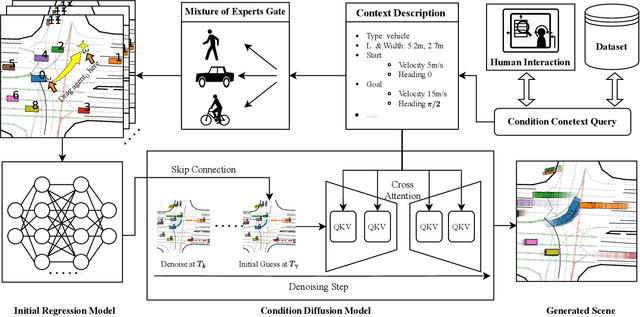


The evaluation and training of autonomous driving systems require diverse and scalable corner cases. However, most existing scene generation methods lack controllability, accuracy, and versatility, resulting in unsatisfactory generation results. To address this problem, we propose Dragtraffic, a generalized, point-based, and controllable traffic scene generation framework based on conditional diffusion. Dragtraffic enables non-experts to generate a variety of realistic driving scenarios for different types of traffic agents through an adaptive mixture expert architecture. We use a regression model to provide a general initial solution and a refinement process based on the conditional diffusion model to ensure diversity. User-customized context is introduced through cross-attention to ensure high controllability. Experiments on a real-world driving dataset show that Dragtraffic outperforms existing methods in terms of authenticity, diversity, and freedom.