 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBarkXAI: A Lightweight Post-Hoc Explainable Method for Tree Species Classification with Quantifiable Concepts
Feb 26, 2025



The precise identification of tree species is fundamental to forestry, conservation, and environmental monitoring. Though many studies have demonstrated that high accuracy can be achieved using bark-based species classification, these models often function as "black boxes", limiting interpretability, trust, and adoption in critical forestry applications. Attribution-based Explainable AI (XAI) methods have been used to address this issue in related works. However, XAI applications are often dependent on local features (such as a head shape or paw in animal applications) and cannot describe global visual features (such as ruggedness or smoothness) that are present in texture-dominant images such as tree bark. Concept-based XAI methods, on the other hand, offer explanations based on global visual features with concepts, but they tend to require large overhead in building external concept image datasets and the concepts can be vague and subjective without good means of precise quantification. To address these challenges, we propose a lightweight post-hoc method to interpret visual models for tree species classification using operators and quantifiable concepts. Our approach eliminates computational overhead, enables the quantification of complex concepts, and evaluates both concept importance and the model's reasoning process. To the best of our knowledge, our work is the first study to explain bark vision models in terms of global visual features with concepts. Using a human-annotated dataset as ground truth, our experiments demonstrate that our method significantly outperforms TCAV and Llama3.2 in concept importance ranking based on Kendall's Tau, highlighting its superior alignment with human perceptions.
Unsupervised Machine Learning for Detecting and Locating Human-Made Objects in 3D Point Cloud
Oct 25, 2024A 3D point cloud is an unstructured, sparse, and irregular dataset, typically collected by airborne LiDAR systems over a geological region. Laser pulses emitted from these systems reflect off objects both on and above the ground, resulting in a dataset containing the longitude, latitude, and elevation of each point, as well as information about the corresponding laser pulse strengths. A widely studied research problem, addressed in many previous works, is ground filtering, which involves partitioning the points into ground and non-ground subsets. This research introduces a novel task: detecting and identifying human-made objects amidst natural tree structures. This task is performed on the subset of non-ground points derived from the ground filtering stage. Marked Point Fields (MPFs) are used as models well-suited to these tasks. The proposed methodology consists of three stages: ground filtering, local information extraction (LIE), and clustering. In the ground filtering stage, a statistical method called One-Sided Regression (OSR) is introduced, addressing the limitations of prior ground filtering methods on uneven terrains. In the LIE stage, unsupervised learning methods are lacking. To mitigate this, a kernel-based method for the Hessian matrix of the MPF is developed. In the clustering stage, the Gaussian Mixture Model (GMM) is applied to the results of the LIE stage to partition the non-ground points into trees and human-made objects. The underlying assumption is that LiDAR points from trees exhibit a three-dimensional distribution, while those from human-made objects follow a two-dimensional distribution. The Hessian matrix of the MPF effectively captures this distinction. Experimental results demonstrate that the proposed ground filtering method outperforms previous techniques, and the LIE method successfully distinguishes between points representing trees and human-made objects.
Tree-D Fusion: Simulation-Ready Tree Dataset from Single Images with Diffusion Priors
Jul 14, 2024We introduce Tree D-fusion, featuring the first collection of 600,000 environmentally aware, 3D simulation-ready tree models generated through Diffusion priors. Each reconstructed 3D tree model corresponds to an image from Google's Auto Arborist Dataset, comprising street view images and associated genus labels of trees across North America. Our method distills the scores of two tree-adapted diffusion models by utilizing text prompts to specify a tree genus, thus facilitating shape reconstruction. This process involves reconstructing a 3D tree envelope filled with point markers, which are subsequently utilized to estimate the tree's branching structure using the space colonization algorithm conditioned on a specified genus.
LiDAR-Forest Dataset: LiDAR Point Cloud Simulation Dataset for Forestry Application
Feb 15, 2024


The popularity of LiDAR devices and sensor technology has gradually empowered users from autonomous driving to forest monitoring, and research on 3D LiDAR has made remarkable progress over the years. Unlike 2D images, whose focused area is visible and rich in texture information, understanding the point distribution can help companies and researchers find better ways to develop point-based 3D applications. In this work, we contribute an unreal-based LiDAR simulation tool and a 3D simulation dataset named LiDAR-Forest, which can be used by various studies to evaluate forest reconstruction, tree DBH estimation, and point cloud compression for easy visualization. The simulation is customizable in tree species, LiDAR types and scene generation, with low cost and high efficiency.
DeepTree: Modeling Trees with Situated Latents
May 09, 2023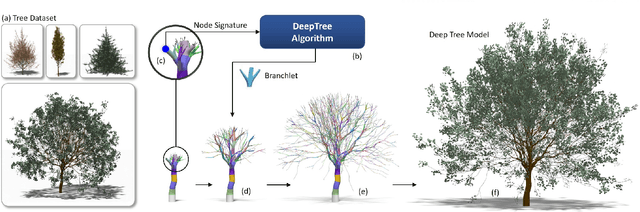
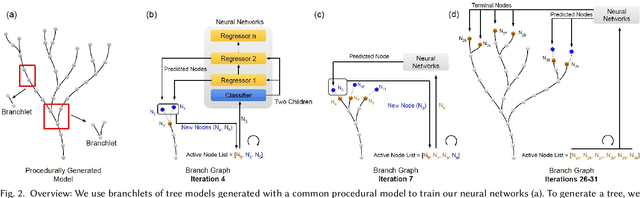
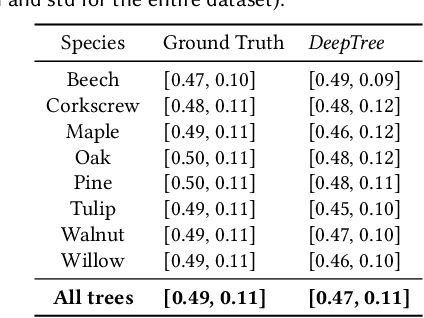
In this paper, we propose DeepTree, a novel method for modeling trees based on learning developmental rules for branching structures instead of manually defining them. We call our deep neural model situated latent because its behavior is determined by the intrinsic state -- encoded as a latent space of a deep neural model -- and by the extrinsic (environmental) data that is situated as the location in the 3D space and on the tree structure. We use a neural network pipeline to train a situated latent space that allows us to locally predict branch growth only based on a single node in the branch graph of a tree model. We use this representation to progressively develop new branch nodes, thereby mimicking the growth process of trees. Starting from a root node, a tree is generated by iteratively querying the neural network on the newly added nodes resulting in the branching structure of the whole tree. Our method enables generating a wide variety of tree shapes without the need to define intricate parameters that control their growth and behavior. Furthermore, we show that the situated latents can also be used to encode the environmental response of tree models, e.g., when trees grow next to obstacles. We validate the effectiveness of our method by measuring the similarity of our tree models and by procedurally generated ones based on a number of established metrics for tree form.