 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Accuracy: An Empirical Study on Unit Testing in Open-source Deep Learning Projects
Feb 26, 2024



Deep Learning (DL) models have rapidly advanced, focusing on achieving high performance through testing model accuracy and robustness. However, it is unclear whether DL projects, as software systems, are tested thoroughly or functionally correct when there is a need to treat and test them like other software systems. Therefore, we empirically study the unit tests in open-source DL projects, analyzing 9,129 projects from GitHub. We find that: 1) unit tested DL projects have positive correlation with the open-source project metrics and have a higher acceptance rate of pull requests, 2) 68% of the sampled DL projects are not unit tested at all, 3) the layer and utilities (utils) of DL models have the most unit tests. Based on these findings and previous research outcomes, we built a mapping taxonomy between unit tests and faults in DL projects. We discuss the implications of our findings for developers and researchers and highlight the need for unit testing in open-source DL projects to ensure their reliability and stability. The study contributes to this community by raising awareness of the importance of unit testing in DL projects and encouraging further research in this area.
LaSOT: A High-quality Large-scale Single Object Tracking Benchmark
Sep 12, 2020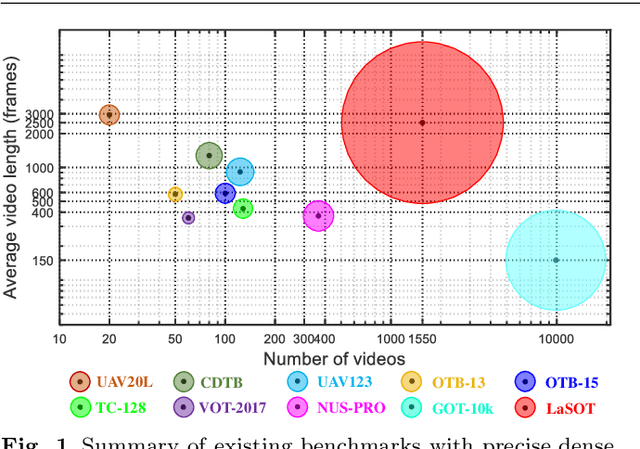
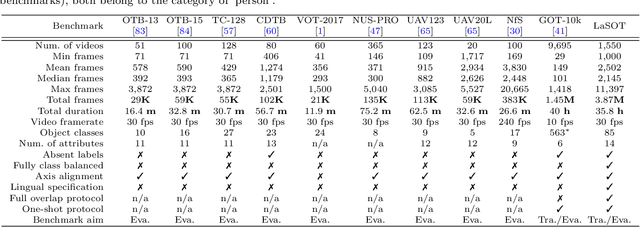
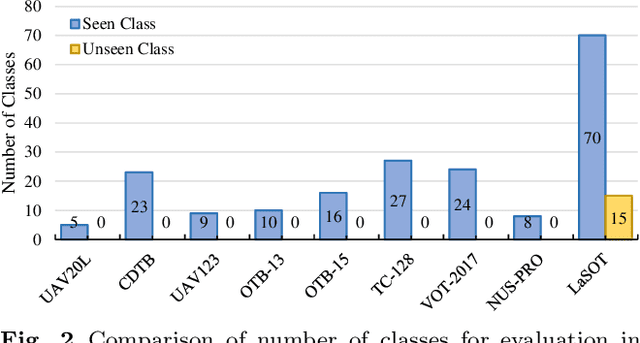
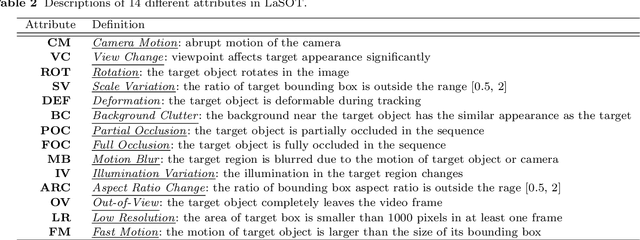
Despite great recent advances in visual tracking, its further development, including both algorithm design and evaluation, is limited due to lack of dedicated large-scale benchmarks. To address this problem, we present LaSOT, a high-quality Large-scale Single Object Tracking benchmark. LaSOT contains a diverse selection of 85 object classes, and offers 1,550 totaling more than 3.87 million frames. Each video frame is carefully and manually annotated with a bounding box. This makes LaSOT, to our knowledge, the largest densely annotated tracking benchmark. Our goal in releasing LaSOT is to provide a dedicated high quality platform for both training and evaluation of trackers. The average video length of LaSOT is around 2,500 frames, where each video contains various challenge factors that exist in real world video footage,such as the targets disappearing and re-appearing. These longer video lengths allow for the assessment of long-term trackers. To take advantage of the close connection between visual appearance and natural language, we provide language specification for each video in LaSOT. We believe such additions will allow for future research to use linguistic features to improve tracking. Two protocols, full-overlap and one-shot, are designated for flexible assessment of trackers. We extensively evaluate 48 baseline trackers on LaSOT with in-depth analysis, and results reveal that there still exists significant room for improvement. The complete benchmark, tracking results as well as analysis are available at http://vision.cs.stonybrook.edu/~lasot/.
Feature Pyramid and Hierarchical Boosting Network for Pavement Crack Detection
Jan 25, 2019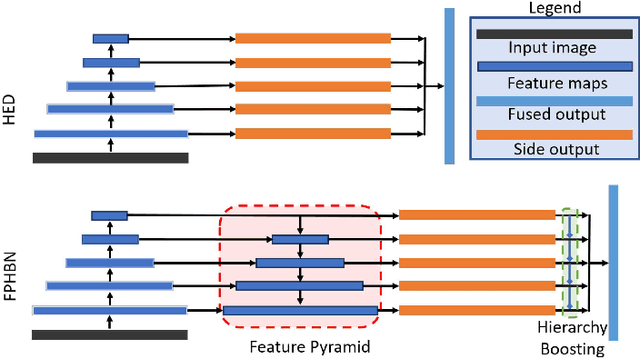


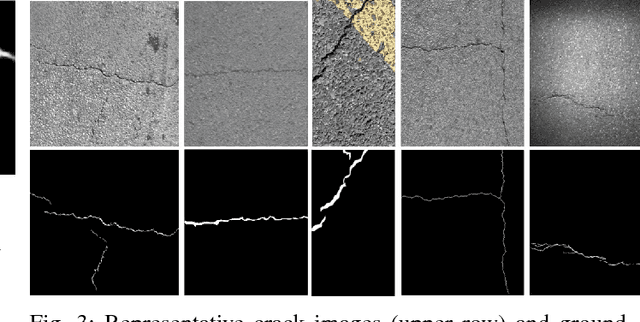
Pavement crack detection is a critical task for insuring road safety. Manual crack detection is extremely time-consuming. Therefore, an automatic road crack detection method is required to boost this progress. However, it remains a challenging task due to the intensity inhomogeneity of cracks and complexity of the background, e.g., the low contrast with surrounding pavements and possible shadows with similar intensity. Inspired by recent advances of deep learning in computer vision, we propose a novel network architecture, named Feature Pyramid and Hierarchical Boosting Network (FPHBN), for pavement crack detection. The proposed network integrates semantic information to low-level features for crack detection in a feature pyramid way. And, it balances the contribution of both easy and hard samples to loss by nested sample reweighting in a hierarchical way. To demonstrate the superiority and generality of the proposed method, we evaluate the proposed method on five crack datasets and compare it with state-of-the-art crack detection, edge detection, semantic segmentation methods. Extensive experiments show that the proposed method outperforms these state-of-the-art methods in terms of accuracy and generality.
LaSOT: A High-quality Benchmark for Large-scale Single Object Tracking
Sep 20, 2018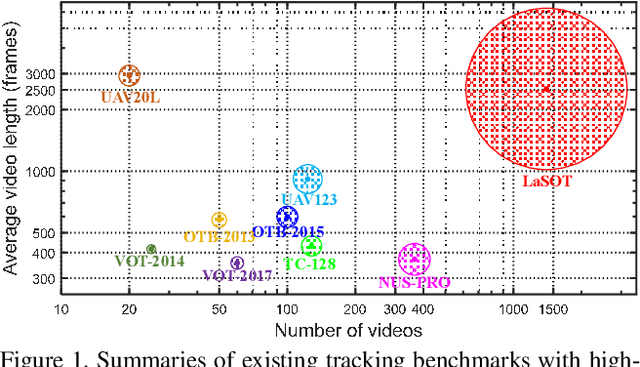
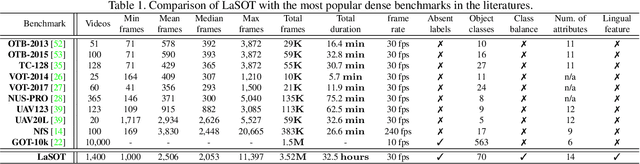
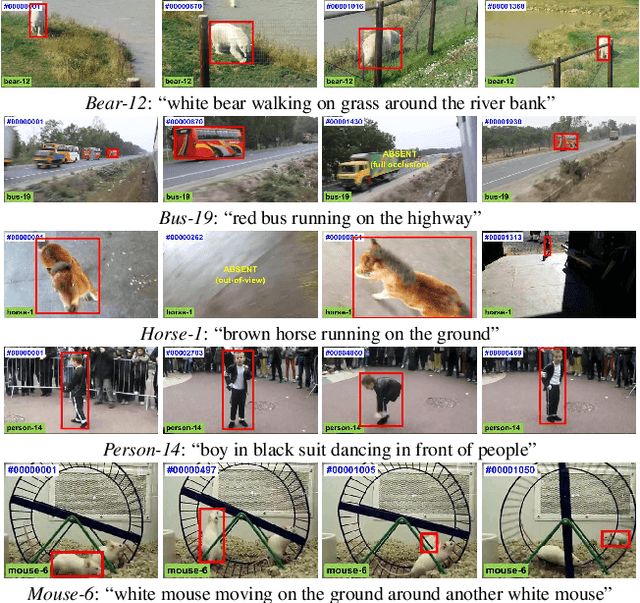
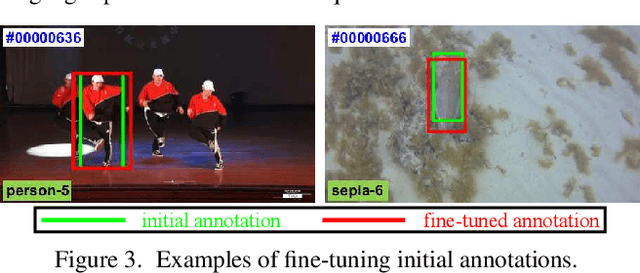
In this paper, we present LaSOT, a high-quality benchmark for Large-scale Single Object Tracking. LaSOT consists of 1,400 sequences with more than 3.5M frames in total. Each frame in these sequences is carefully and manually annotated with a bounding box, making LaSOT the largest, to the best of our knowledge, densely annotated tracking benchmark. The average sequence length of LaSOT is more than 2,500 frames, and each sequence comprises various challenges deriving from the wild where target objects may disappear and re-appear again in the view. By releasing LaSOT, we expect to provide the community a large-scale dedicated benchmark with high-quality for both the training of deep trackers and the veritable evaluation of tracking algorithms. Moreover, considering the close connections of visual appearance and natural language, we enrich LaSOT by providing additional language specification, aiming at encouraging the exploration of natural linguistic feature for tracking. A thorough experimental evaluation of 35 tracking algorithms on LaSOT is presented with detailed analysis, and the results demonstrate that there is still a big room to improvements. The benchmark and evaluation results are made publicly available at https://cis.temple.edu/lasot/.