 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDuckSegmentation: A segmentation model based on the AnYue Hemp Duck Dataset
Mar 27, 2025

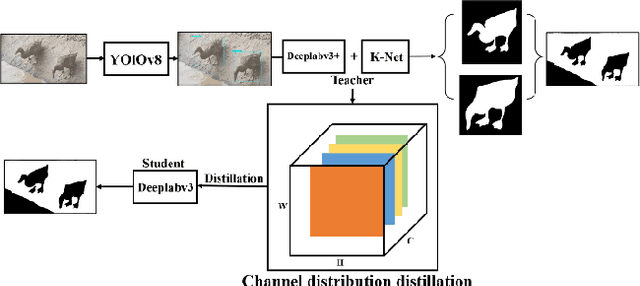

The modernization of smart farming is a way to improve agricultural production efficiency, and improve the agricultural production environment. Although many large models have achieved high accuracy in the task of object recognition and segmentation, they cannot really be put into use in the farming industry due to their own poor interpretability and limitations in computational volume. In this paper, we built AnYue Shelduck Dateset, which contains a total of 1951 Shelduck datasets, and performed target detection and segmentation annotation with the help of professional annotators. Based on AnYue ShelduckDateset, this paper describes DuckProcessing, an efficient and powerful module for duck identification based on real shelduckfarms. First of all, using the YOLOv8 module designed to divide the mahjong between them, Precision reached 98.10%, Recall reached 96.53% and F1 score reached 0.95 on the test set. Again using the DuckSegmentation segmentation model, DuckSegmentation reached 96.43% mIoU. Finally, the excellent DuckSegmentation was used as the teacher model, and through knowledge distillation, Deeplabv3 r50 was used as the student model, and the final student model achieved 94.49% mIoU on the test set. The method provides a new way of thinking in practical sisal duck smart farming.
Colmap-PCD: An Open-source Tool for Fine Image-to-point cloud Registration
Oct 09, 2023



State-of-the-art techniques for monocular camera reconstruction predominantly rely on the Structure from Motion (SfM) pipeline. However, such methods often yield reconstruction outcomes that lack crucial scale information, and over time, accumulation of images leads to inevitable drift issues. In contrast, mapping methods based on LiDAR scans are popular in large-scale urban scene reconstruction due to their precise distance measurements, a capability fundamentally absent in visual-based approaches. Researchers have made attempts to utilize concurrent LiDAR and camera measurements in pursuit of precise scaling and color details within mapping outcomes. However, the outcomes are subject to extrinsic calibration and time synchronization precision. In this paper, we propose a novel cost-effective reconstruction pipeline that utilizes a pre-established LiDAR map as a fixed constraint to effectively address the inherent scale challenges present in monocular camera reconstruction. To our knowledge, our method is the first to register images onto the point cloud map without requiring synchronous capture of camera and LiDAR data, granting us the flexibility to manage reconstruction detail levels across various areas of interest. To facilitate further research in this domain, we have released Colmap-PCD${^{3}}$, an open-source tool leveraging the Colmap algorithm, that enables precise fine-scale registration of images to the point cloud map.
AutoMerge: A Framework for Map Assembling and Smoothing in City-scale Environments
Jul 14, 2022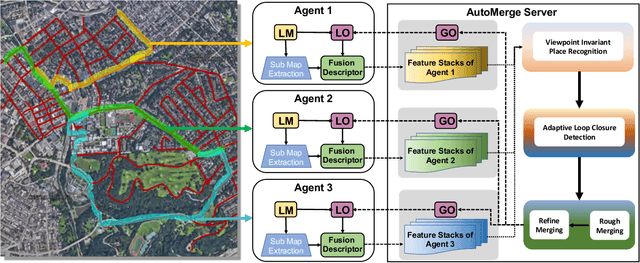
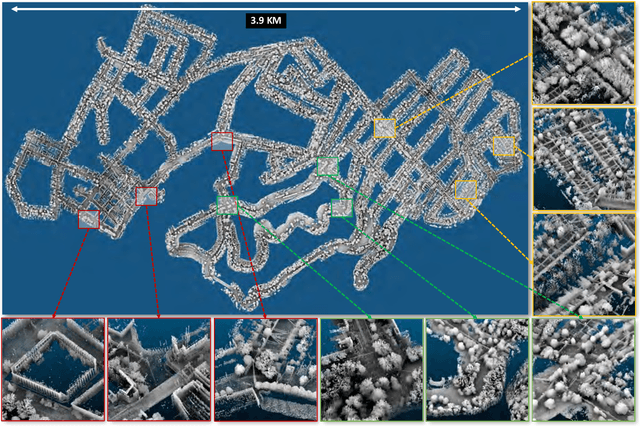
We present AutoMerge, a LiDAR data processing framework for assembling a large number of map segments into a complete map. Traditional large-scale map merging methods are fragile to incorrect data associations, and are primarily limited to working only offline. AutoMerge utilizes multi-perspective fusion and adaptive loop closure detection for accurate data associations, and it uses incremental merging to assemble large maps from individual trajectory segments given in random order and with no initial estimations. Furthermore, after assembling the segments, AutoMerge performs fine matching and pose-graph optimization to globally smooth the merged map. We demonstrate AutoMerge on both city-scale merging (120km) and campus-scale repeated merging (4.5km x 8). The experiments show that AutoMerge (i) surpasses the second- and third- best methods by 14% and 24% recall in segment retrieval, (ii) achieves comparable 3D mapping accuracy for 120 km large-scale map assembly, (iii) and it is robust to temporally-spaced revisits. To the best of our knowledge, AutoMerge is the first mapping approach that can merge hundreds of kilometers of individual segments without the aid of GPS.
ALITA: A Large-scale Incremental Dataset for Long-term Autonomy
May 22, 2022


For long-term autonomy, most place recognition methods are mainly evaluated on simplified scenarios or simulated datasets, which cannot provide solid evidence to evaluate the readiness for current Simultaneous Localization and Mapping (SLAM). In this paper, we present a long-term place recognition dataset for use in mobile localization under large-scale dynamic environments. This dataset includes a campus-scale track and a city-scale track: 1) the campus-track focuses the long-term property, we record LiDAR device and an omnidirectional camera on 10 trajectories, and each trajectory are repeatly recorded 8 times under variant illumination conditions. 2) the city-track focuses the large-scale property, we mount the LiDAR device on the vehicle and traversing through a 120km trajectories, which contains open streets, residential areas, natural terrains, etc. They includes 200 hours of raw data of all kinds scenarios within urban environments. The ground truth position for both tracks are provided on each trajectory, which is obtained from the Global Position System with an additional General ICP based point cloud refinement. To simplify the evaluation procedure, we also provide the Python-API with a set of place recognition metrics is proposed to quickly load our dataset and evaluate the recognition performance against different methods. This dataset targets at finding methods with high place recognition accuracy and robustness, and providing real robotic system with long-term autonomy. The dataset and the provided tools can be accessed from https://github.com/MetaSLAM/ALITA.
Generalized Omega Turn Gait Enables Agile Limbless Robot Turning in Complex Environments
Feb 03, 2022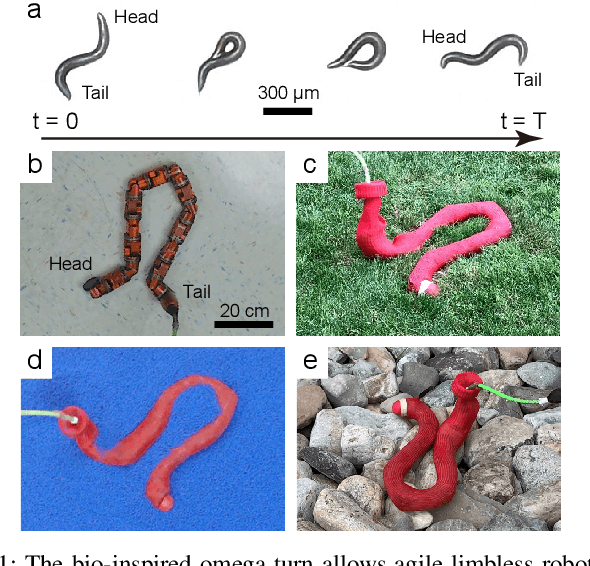
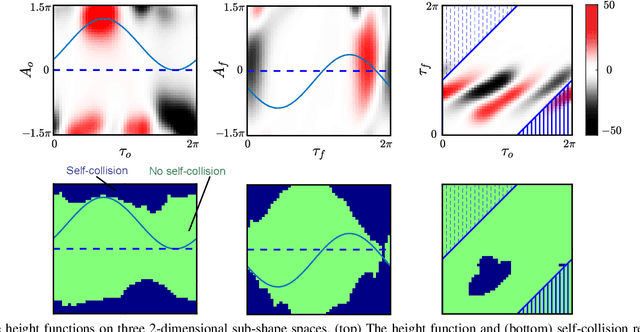
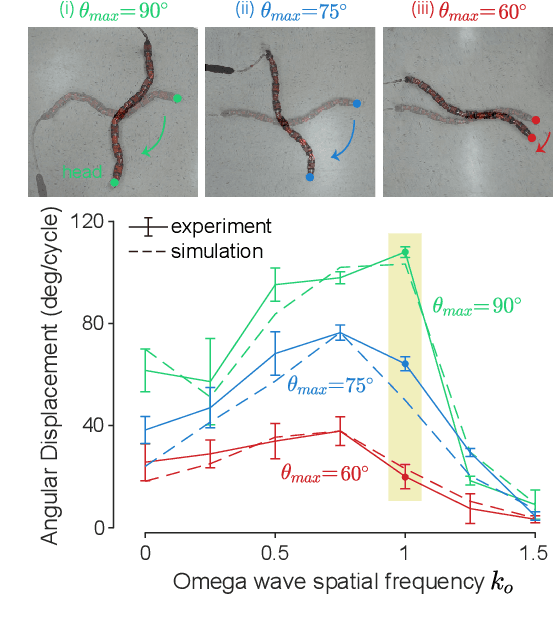
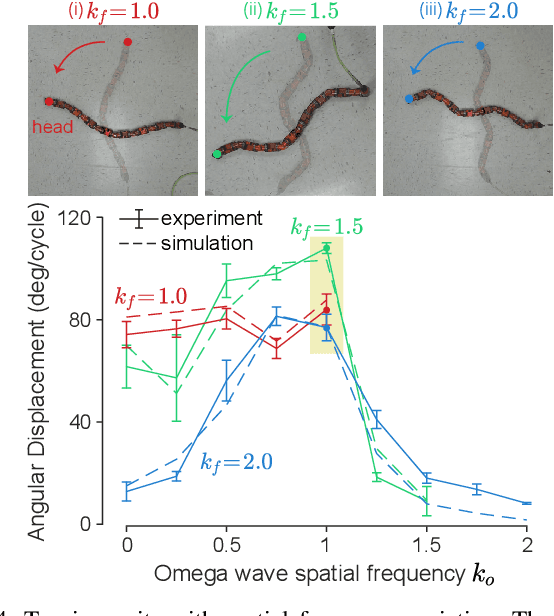
Reorientation (turning in plane) plays a critical role for all robots in any field application, especially those that in confined spaces. While important, reorientation remains a relatively unstudied problem for robots, including limbless mechanisms, often called snake robots. Instead of looking at snakes, we take inspiration from observations of the turning behavior of tiny nematode worms C. elegans. Our previous work presented an in-place and in-plane turning gait for limbless robots, called an omega turn, and prescribed it using a novel two-wave template. In this work, we advance omega turn-inspired controllers in three aspects: 1) we use geometric methods to vary joint angle amplitudes and forward wave spatial frequency in our turning equation to establish a wide and precise amplitude modulation and frequency modulation on omega turn; 2) we use this new relationship to enable robots with fewer internal degrees of freedom (i.e., fewer joints in the body) to achieve desirable performance, and 3) we apply compliant control methods to this relationship to handle unmodelled effects in the environment. We experimentally validate our approach on a limbless robot that the omega turn can produce effective and robust turning motion in various types of environments, such as granular media and rock pile.