 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCOUT: An in-vivo Methane Sensing System for Real-time Monitoring of Enteric Emissions in Cattle with ex-vivo Validation
Aug 06, 2025Accurate measurement of enteric methane emissions remains a critical bottleneck for advancing livestock sustainability through genetic selection and precision management. Existing ambient sampling approaches suffer from low data retention rates, environmental interference, and limited temporal resolution. We developed SCOUT (Smart Cannula-mounted Optical Unit for Trace-methane), the first robust in-vivo sensing system enabling continuous, high-resolution monitoring of ruminal methane concentrations through an innovative closed-loop gas recirculation design. We conducted comprehensive validation with two cannulated Simmental heifers under contrasting dietary treatments, with cross-platform comparison against established ambient sniffer systems. SCOUT achieved exceptional performance with 82% data retention compared to 17% for conventional sniffer systems, while capturing methane concentrations 100-1000x higher than ambient approaches. Cross-platform validation demonstrated strong scale-dependent correlations, with optimal correlation strength (r = -0.564 $\pm$ 0.007) at biologically relevant 40-minute windows and 100% statistical significance. High-frequency monitoring revealed novel behavior-emission coupling, including rapid concentration changes (14.5 $\pm$ 11.3k ppm) triggered by postural transitions within 15 minutes, insights previously inaccessible through existing technologies. The SCOUT system represents a transformative advancement, enabling accurate, continuous emission phenotyping essential for genomic selection programs and sustainable precision livestock management. This validation framework establishes new benchmarks for agricultural sensor performance while generating unprecedented biological insights into ruminal methane dynamics, contributing essential tools for sustainable livestock production in climate-conscious agricultural systems.
Generalized Omega Turn Gait Enables Agile Limbless Robot Turning in Complex Environments
Feb 03, 2022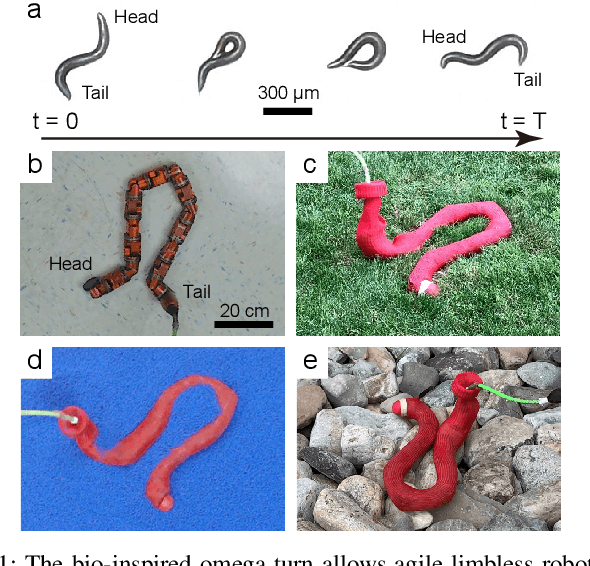
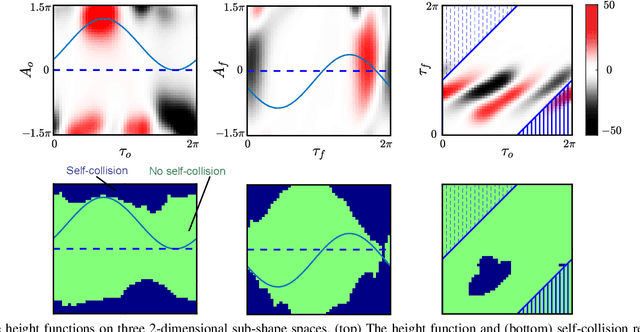
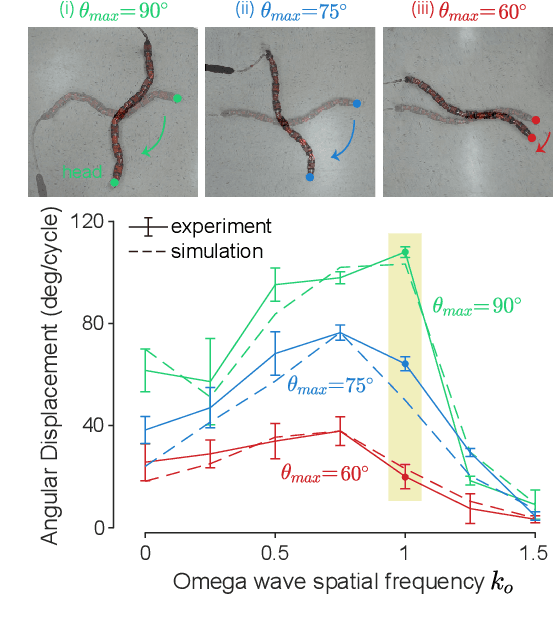
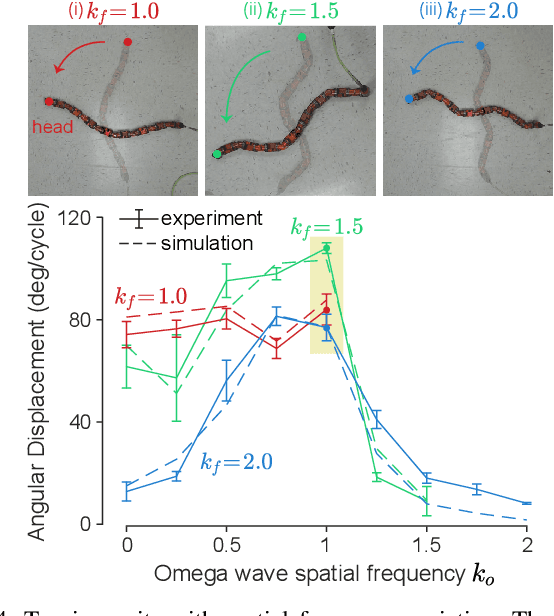
Reorientation (turning in plane) plays a critical role for all robots in any field application, especially those that in confined spaces. While important, reorientation remains a relatively unstudied problem for robots, including limbless mechanisms, often called snake robots. Instead of looking at snakes, we take inspiration from observations of the turning behavior of tiny nematode worms C. elegans. Our previous work presented an in-place and in-plane turning gait for limbless robots, called an omega turn, and prescribed it using a novel two-wave template. In this work, we advance omega turn-inspired controllers in three aspects: 1) we use geometric methods to vary joint angle amplitudes and forward wave spatial frequency in our turning equation to establish a wide and precise amplitude modulation and frequency modulation on omega turn; 2) we use this new relationship to enable robots with fewer internal degrees of freedom (i.e., fewer joints in the body) to achieve desirable performance, and 3) we apply compliant control methods to this relationship to handle unmodelled effects in the environment. We experimentally validate our approach on a limbless robot that the omega turn can produce effective and robust turning motion in various types of environments, such as granular media and rock pile.