 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Quality Large-Scale 3-D Urban Mapping with Multi-Master TomoSAR
May 08, 2023Multi-baseline interferometric synthetic aperture radar (InSAR) techniques are effective approaches for retrieving the 3-D information of urban areas. In order to obtain a plausible reconstruction, it is necessary to use large-stack interferograms. Hence, these methods are commonly not appropriate for large-scale 3-D urban mapping using TanDEM-X data where only a few acquisitions are available in average for each city. This work proposes a new SAR tomographic processing framework to work with those extremely small stacks, which integrates the non-local filtering into SAR tomography inversion. The applicability of the algorithm is demonstrated using a TanDEM-X multi-baseline stack with 5 bistatic interferograms over the whole city of Munich, Germany. Systematic comparison of our result with airborne LiDAR data shows that the relative height accuracy of two third buildings is within two meters, which outperforms the TanDEM-X raw DEM. The promising performance of the proposed algorithm paved the first step towards high quality large-scale 3-D urban mapping.
A Survey of Uncertainty in Deep Neural Networks
Jul 07, 2021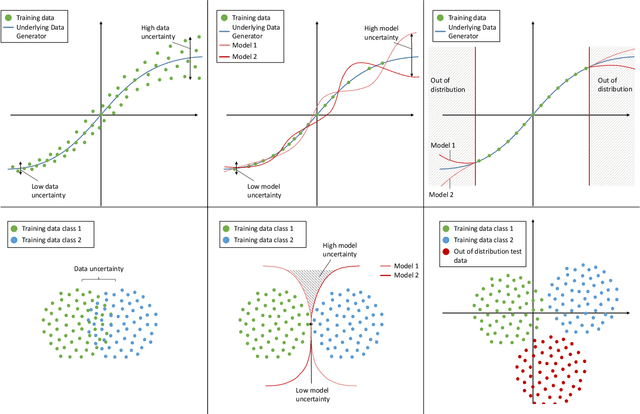
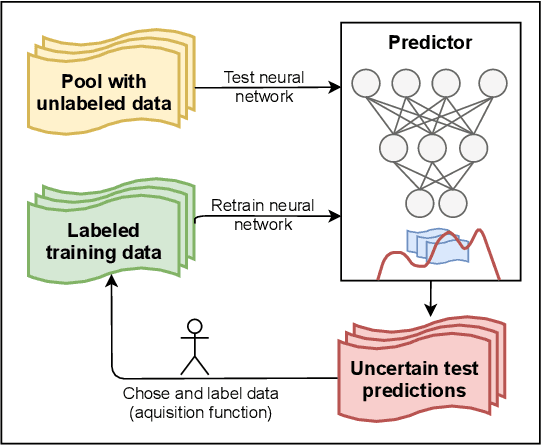
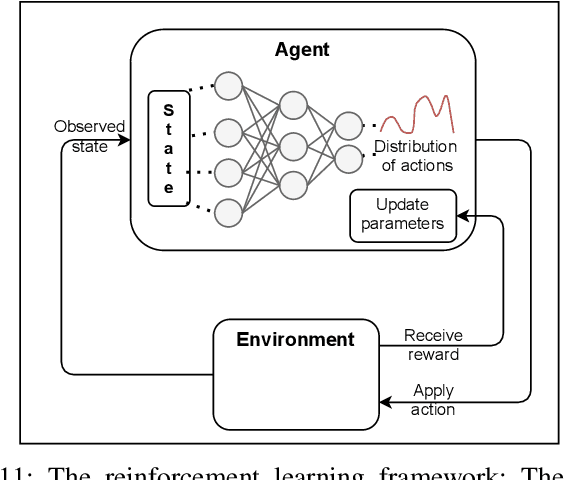
Due to their increasing spread, confidence in neural network predictions became more and more important. However, basic neural networks do not deliver certainty estimates or suffer from over or under confidence. Many researchers have been working on understanding and quantifying uncertainty in a neural network's prediction. As a result, different types and sources of uncertainty have been identified and a variety of approaches to measure and quantify uncertainty in neural networks have been proposed. This work gives a comprehensive overview of uncertainty estimation in neural networks, reviews recent advances in the field, highlights current challenges, and identifies potential research opportunities. It is intended to give anyone interested in uncertainty estimation in neural networks a broad overview and introduction, without presupposing prior knowledge in this field. A comprehensive introduction to the most crucial sources of uncertainty is given and their separation into reducible model uncertainty and not reducible data uncertainty is presented. The modeling of these uncertainties based on deterministic neural networks, Bayesian neural networks, ensemble of neural networks, and test-time data augmentation approaches is introduced and different branches of these fields as well as the latest developments are discussed. For a practical application, we discuss different measures of uncertainty, approaches for the calibration of neural networks and give an overview of existing baselines and implementations. Different examples from the wide spectrum of challenges in different fields give an idea of the needs and challenges regarding uncertainties in practical applications. Additionally, the practical limitations of current methods for mission- and safety-critical real world applications are discussed and an outlook on the next steps towards a broader usage of such methods is given.
Deep Learning Meets SAR
Jun 17, 2020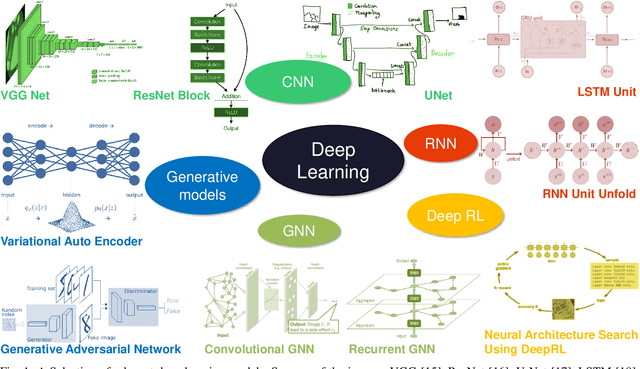
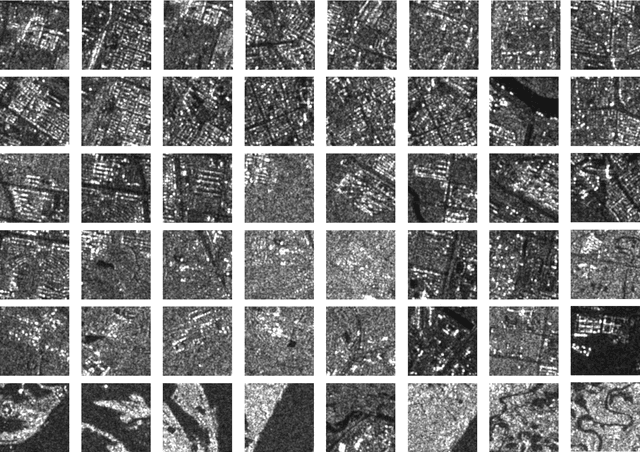
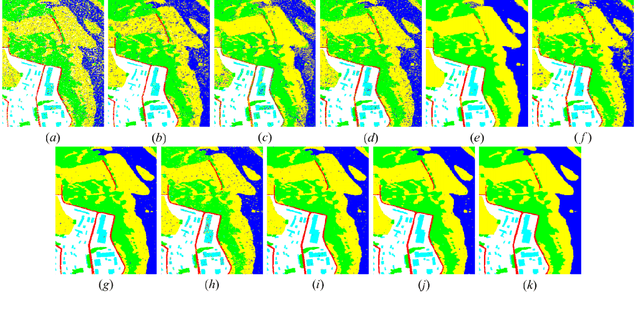
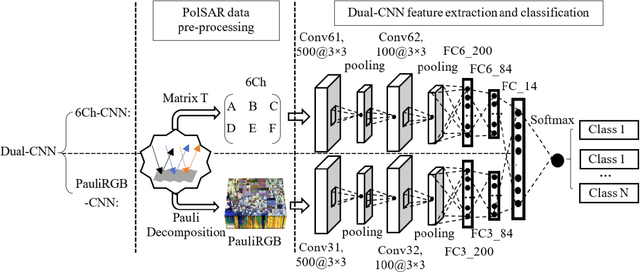
Deep learning in remote sensing has become an international hype, but it is mostly limited to the evaluation of optical data. Although deep learning has been introduced in SAR data processing, despite successful first attempts, its huge potential remains locked. For example, to the best knowledge of the authors, there is no single example of deep learning in SAR that has been developed up to operational processing of big data or integrated into the production chain of any satellite mission. In this paper, we provide an introduction to the most relevant deep learning models and concepts, point out possible pitfalls by analyzing special characteristics of SAR data, review the state-of-the-art of deep learning applied to SAR in depth, summarize available benchmarks, and recommend some important future research directions. With this effort, we hope to stimulate more research in this interesting yet under-exploited research field.
SAR Tomography at the Limit: Building Height Reconstruction Using Only 3-5 TanDEM-X Bistatic Interferograms
Mar 17, 2020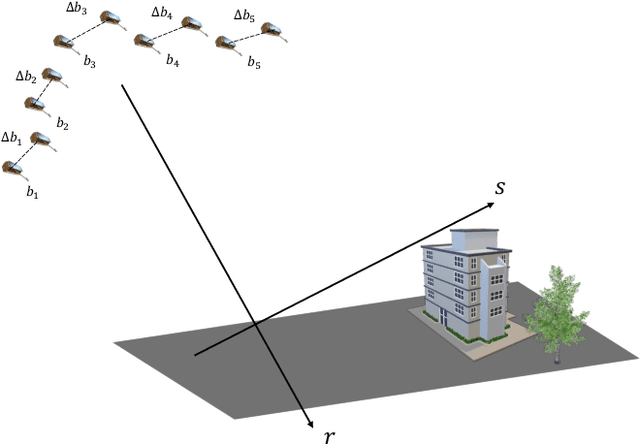
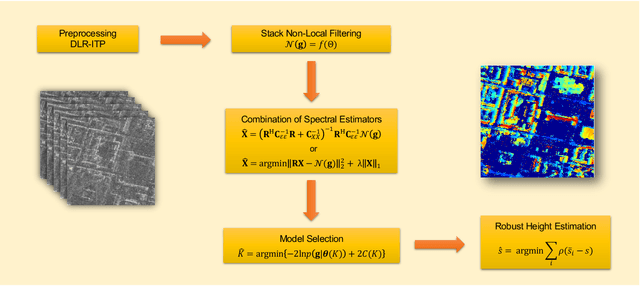
Multi-baseline interferometric synthetic aperture radar (InSAR) techniques are effective approaches for retrieving the 3-D information of urban areas. In order to obtain a plausible reconstruction, it is necessary to use more than twenty interferograms. Hence, these methods are commonly not appropriate for large-scale 3-D urban mapping using TanDEM-X data where only a few acquisitions are available in average for each city. This work proposes a new SAR tomographic processing framework to work with those extremely small stacks, which integrates the non-local filtering into SAR tomography inversion. The applicability of the algorithm is demonstrated using a TanDEM-X multi-baseline stack with 5 bistatic interferograms over the whole city of Munich, Germany. Systematic comparison of our result with TanDEM-X raw digital elevation models (DEM) and airborne LiDAR data shows that the relative height accuracy of two third buildings is within two meters, which outperforms the TanDEM-X raw DEM. The promising performance of the proposed algorithm paved the first step towards high quality large-scale 3-D urban mapping.
Non-Local Compressive Sensing Based SAR Tomography
Nov 05, 2018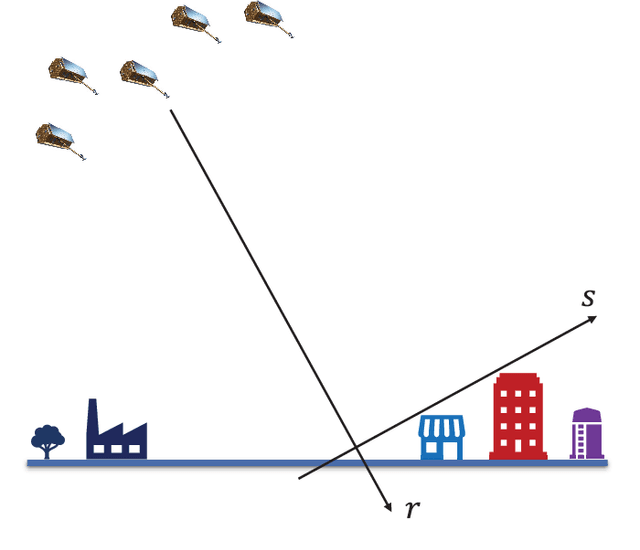
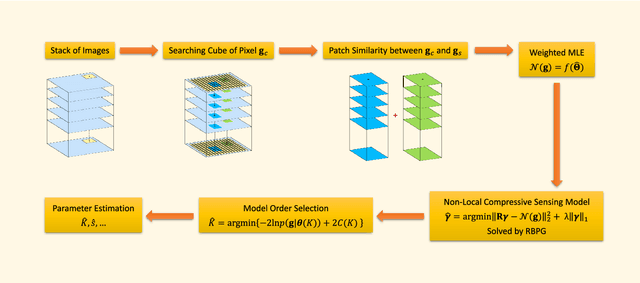
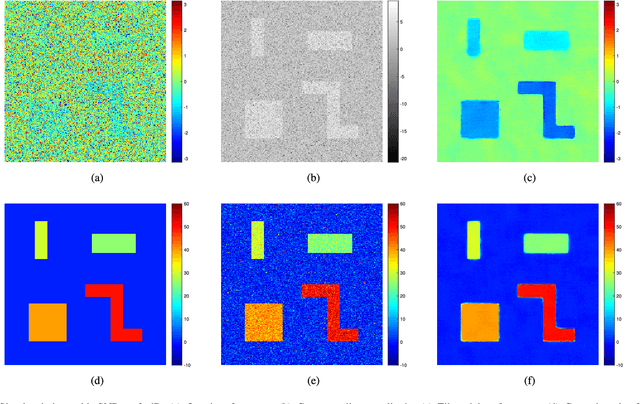
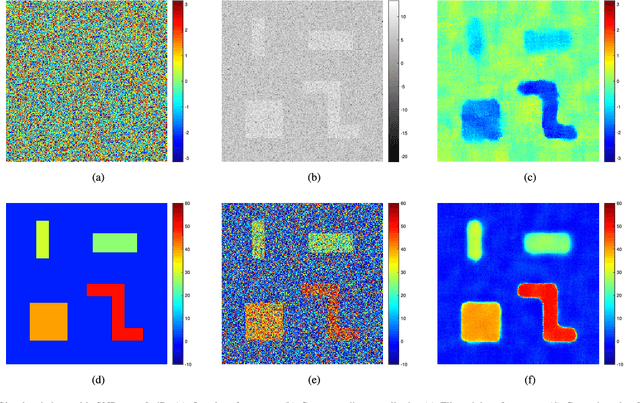
Tomographic SAR (TomoSAR) inversion of urban areas is an inherently sparse reconstruction problem and, hence, can be solved using compressive sensing (CS) algorithms. This paper proposes solutions for two notorious problems in this field: 1) TomoSAR requires a high number of data sets, which makes the technique expensive. However, it can be shown that the number of acquisitions and the signal-to-noise ratio (SNR) can be traded off against each other, because it is asymptotically only the product of the number of acquisitions and SNR that determines the reconstruction quality. We propose to increase SNR by integrating non-local estimation into the inversion and show that a reasonable reconstruction of buildings from only seven interferograms is feasible. 2) CS-based inversion is computationally expensive and therefore barely suitable for large-scale applications. We introduce a new fast and accurate algorithm for solving the non-local L1-L2-minimization problem, central to CS-based reconstruction algorithms. The applicability of the algorithm is demonstrated using simulated data and TerraSAR-X high-resolution spotlight images over an area in Munich, Germany.