 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRL-VLA: Continual Vision-Language-Action Learning
Feb 03, 2026Lifelong learning is critical for embodied agents in open-world environments, where reinforcement learning fine-tuning has emerged as an important paradigm to enable Vision-Language-Action (VLA) models to master dexterous manipulation through environmental interaction. Thus, Continual Reinforcement Learning (CRL) is a promising pathway for deploying VLA models in lifelong robotic scenarios, yet balancing stability (retaining old skills) and plasticity (learning new ones) remains a formidable challenge for existing methods. We introduce CRL-VLA, a framework for continual post-training of VLA models with rigorous theoretical bounds. We derive a unified performance bound linking the stability-plasticity trade-off to goal-conditioned advantage magnitude, scaled by policy divergence. CRL-VLA resolves this dilemma via asymmetric regulation: constraining advantage magnitudes on prior tasks while enabling controlled growth on new tasks. This is realized through a simple but effective dual-critic architecture with novel Goal-Conditioned Value Formulation (GCVF), where a frozen critic anchors semantic consistency and a trainable estimator drives adaptation. Experiments on the LIBERO benchmark demonstrate that CRL-VLA effectively harmonizes these conflicting objectives, outperforming baselines in both anti-forgetting and forward adaptation.
Integrating Trajectory Optimization and Reinforcement Learning for Quadrupedal Jumping with Terrain-Adaptive Landing
Sep 16, 2025Jumping constitutes an essential component of quadruped robots' locomotion capabilities, which includes dynamic take-off and adaptive landing. Existing quadrupedal jumping studies mainly focused on the stance and flight phase by assuming a flat landing ground, which is impractical in many real world cases. This work proposes a safe landing framework that achieves adaptive landing on rough terrains by combining Trajectory Optimization (TO) and Reinforcement Learning (RL) together. The RL agent learns to track the reference motion generated by TO in the environments with rough terrains. To enable the learning of compliant landing skills on challenging terrains, a reward relaxation strategy is synthesized to encourage exploration during landing recovery period. Extensive experiments validate the accurate tracking and safe landing skills benefiting from our proposed method in various scenarios.
Learning Robotic Policy with Imagined Transition: Mitigating the Trade-off between Robustness and Optimality
Mar 13, 2025Existing quadrupedal locomotion learning paradigms usually rely on extensive domain randomization to alleviate the sim2real gap and enhance robustness. It trains policies with a wide range of environment parameters and sensor noises to perform reliably under uncertainty. However, since optimal performance under ideal conditions often conflicts with the need to handle worst-case scenarios, there is a trade-off between optimality and robustness. This trade-off forces the learned policy to prioritize stability in diverse and challenging conditions over efficiency and accuracy in ideal ones, leading to overly conservative behaviors that sacrifice peak performance. In this paper, we propose a two-stage framework that mitigates this trade-off by integrating policy learning with imagined transitions. This framework enhances the conventional reinforcement learning (RL) approach by incorporating imagined transitions as demonstrative inputs. These imagined transitions are derived from an optimal policy and a dynamics model operating within an idealized setting. Our findings indicate that this approach significantly mitigates the domain randomization-induced negative impact of existing RL algorithms. It leads to accelerated training, reduced tracking errors within the distribution, and enhanced robustness outside the distribution.
Cooperative Visual-LiDAR Extrinsic Calibration Technology for Intersection Vehicle-Infrastructure: A review
May 16, 2024



In the typical urban intersection scenario, both vehicles and infrastructures are equipped with visual and LiDAR sensors. By successfully integrating the data from vehicle-side and road monitoring devices, a more comprehensive and accurate environmental perception and information acquisition can be achieved. The Calibration of sensors, as an essential component of autonomous driving technology, has consistently drawn significant attention. Particularly in scenarios involving multiple sensors collaboratively perceiving and addressing localization challenges, the requirement for inter-sensor calibration becomes crucial. Recent years have witnessed the emergence of the concept of multi-end cooperation, where infrastructure captures and transmits surrounding environment information to vehicles, bolstering their perception capabilities while mitigating costs. However, this also poses technical complexities, underscoring the pressing need for diverse end calibration. Camera and LiDAR, the bedrock sensors in autonomous driving, exhibit expansive applicability. This paper comprehensively examines and analyzes the calibration of multi-end camera-LiDAR setups from vehicle, roadside, and vehicle-road cooperation perspectives, outlining their relevant applications and profound significance. Concluding with a summary, we present our future-oriented ideas and hypotheses.
USB: A Unified Semi-supervised Learning Benchmark
Aug 12, 2022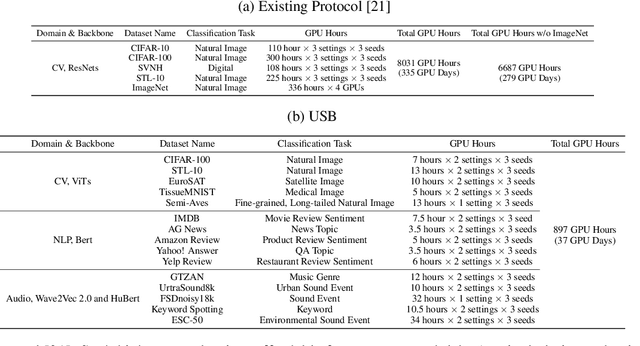
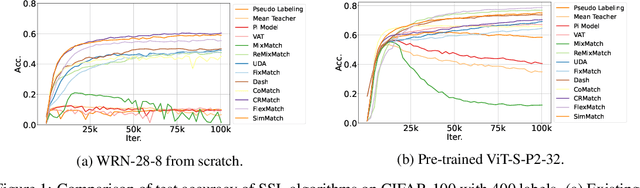
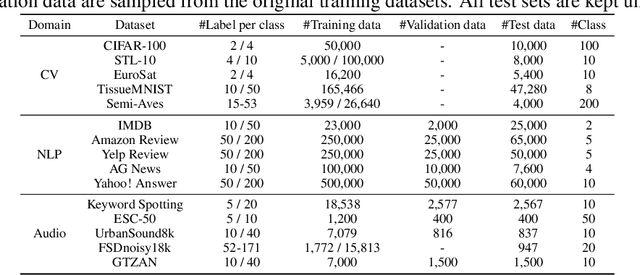
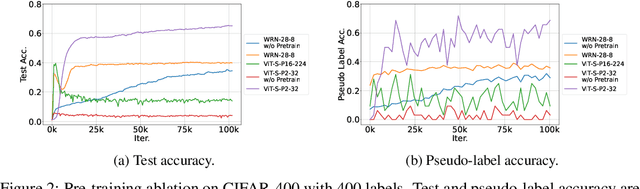
Semi-supervised learning (SSL) improves model generalization by leveraging massive unlabeled data to augment limited labeled samples. However, currently, popular SSL evaluation protocols are often constrained to computer vision (CV) tasks. In addition, previous work typically trains deep neural networks from scratch, which is time-consuming and environmentally unfriendly. To address the above issues, we construct a Unified SSL Benchmark (USB) by selecting 15 diverse, challenging, and comprehensive tasks from CV, natural language processing (NLP), and audio processing (Audio), on which we systematically evaluate dominant SSL methods, and also open-source a modular and extensible codebase for fair evaluation on these SSL methods. We further provide pre-trained versions of the state-of-the-art neural models for CV tasks to make the cost affordable for further tuning. USB enables the evaluation of a single SSL algorithm on more tasks from multiple domains but with less cost. Specifically, on a single NVIDIA V100, only 37 GPU days are required to evaluate FixMatch on 15 tasks in USB while 335 GPU days (279 GPU days on 4 CV datasets except for ImageNet) are needed on 5 CV tasks with the typical protocol.