 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoLO: Proof-of-Learning and Proof-of-Ownership at Once with Chained Watermarking
May 18, 2025Machine learning models are increasingly shared and outsourced, raising requirements of verifying training effort (Proof-of-Learning, PoL) to ensure claimed performance and establishing ownership (Proof-of-Ownership, PoO) for transactions. When models are trained by untrusted parties, PoL and PoO must be enforced together to enable protection, attribution, and compensation. However, existing studies typically address them separately, which not only weakens protection against forgery and privacy breaches but also leads to high verification overhead. We propose PoLO, a unified framework that simultaneously achieves PoL and PoO using chained watermarks. PoLO splits the training process into fine-grained training shards and embeds a dedicated watermark in each shard. Each watermark is generated using the hash of the preceding shard, certifying the training process of the preceding shard. The chained structure makes it computationally difficult to forge any individual part of the whole training process. The complete set of watermarks serves as the PoL, while the final watermark provides the PoO. PoLO offers more efficient and privacy-preserving verification compared to the vanilla PoL solutions that rely on gradient-based trajectory tracing and inadvertently expose training data during verification, while maintaining the same level of ownership assurance of watermark-based PoO schemes. Our evaluation shows that PoLO achieves 99% watermark detection accuracy for ownership verification, while preserving data privacy and cutting verification costs to just 1.5-10% of traditional methods. Forging PoLO demands 1.1-4x more resources than honest proof generation, with the original proof retaining over 90% detection accuracy even after attacks.
ByCAN: Reverse Engineering Controller Area Network (CAN) Messages from Bit to Byte Level
Aug 17, 2024



As the primary standard protocol for modern cars, the Controller Area Network (CAN) is a critical research target for automotive cybersecurity threats and autonomous applications. As the decoding specification of CAN is a proprietary black-box maintained by Original Equipment Manufacturers (OEMs), conducting related research and industry developments can be challenging without a comprehensive understanding of the meaning of CAN messages. In this paper, we propose a fully automated reverse-engineering system, named ByCAN, to reverse engineer CAN messages. ByCAN outperforms existing research by introducing byte-level clusters and integrating multiple features at both byte and bit levels. ByCAN employs the clustering and template matching algorithms to automatically decode the specifications of CAN frames without the need for prior knowledge. Experimental results demonstrate that ByCAN achieves high accuracy in slicing and labeling performance, i.e., the identification of CAN signal boundaries and labels. In the experiments, ByCAN achieves slicing accuracy of 80.21%, slicing coverage of 95.21%, and labeling accuracy of 68.72% for general labels when analyzing the real-world CAN frames.
A Secure Aggregation for Federated Learning on Long-Tailed Data
Jul 17, 2023


As a distributed learning, Federated Learning (FL) faces two challenges: the unbalanced distribution of training data among participants, and the model attack by Byzantine nodes. In this paper, we consider the long-tailed distribution with the presence of Byzantine nodes in the FL scenario. A novel two-layer aggregation method is proposed for the rejection of malicious models and the advisable selection of valuable models containing tail class data information. We introduce the concept of think tank to leverage the wisdom of all participants. Preliminary experiments validate that the think tank can make effective model selections for global aggregation.
Blockchained Federated Learning for Internet of Things: A Comprehensive Survey
May 08, 2023



The demand for intelligent industries and smart services based on big data is rising rapidly with the increasing digitization and intelligence of the modern world. This survey comprehensively reviews Blockchained Federated Learning (BlockFL) that joins the benefits of both Blockchain and Federated Learning to provide a secure and efficient solution for the demand. We compare the existing BlockFL models in four Internet-of-Things (IoT) application scenarios: Personal IoT (PIoT), Industrial IoT (IIoT), Internet of Vehicles (IoV), and Internet of Health Things (IoHT), with a focus on security and privacy, trust and reliability, efficiency, and data heterogeneity. Our analysis shows that the features of decentralization and transparency make BlockFL a secure and effective solution for distributed model training, while the overhead and compatibility still need further study. It also reveals the unique challenges of each domain presents unique challenges, e.g., the requirement of accommodating dynamic environments in IoV and the high demands of identity and permission management in IoHT, in addition to some common challenges identified, such as privacy, resource constraints, and data heterogeneity. Furthermore, we examine the existing technologies that can benefit BlockFL, thereby helping researchers and practitioners to make informed decisions about the selection and development of BlockFL for various IoT application scenarios.
Learning-based Intelligent Surface Configuration, User Selection, Channel Allocation, and Modulation Adaptation for Jamming-resisting Multiuser OFDMA Systems
Jan 16, 2023Reconfigurable intelligent surfaces (RISs) can potentially combat jamming attacks by diffusing jamming signals. This paper jointly optimizes user selection, channel allocation, modulation-coding, and RIS configuration in a multiuser OFDMA system under a jamming attack. This problem is non-trivial and has never been addressed, because of its mixed-integer programming nature and difficulties in acquiring channel state information (CSI) involving the RIS and jammer. We propose a new deep reinforcement learning (DRL)-based approach, which learns only through changes in the received data rates of the users to reject the jamming signals and maximize the sum rate of the system. The key idea is that we decouple the discrete selection of users, channels, and modulation-coding from the continuous RIS configuration, hence facilitating the RIS configuration with the latest twin delayed deep deterministic policy gradient (TD3) model. Another important aspect is that we show a winner-takes-all strategy is almost surely optimal for selecting the users, channels, and modulation-coding, given a learned RIS configuration. Simulations show that the new approach converges fast to fulfill the benefit of the RIS, due to its substantially small state and action spaces. Without the need of the CSI, the approach is promising and offers practical value.
* accepted by IEEE TCOM in Jan. 2023
IronForge: An Open, Secure, Fair, Decentralized Federated Learning
Jan 07, 2023Federated learning (FL) provides an effective machine learning (ML) architecture to protect data privacy in a distributed manner. However, the inevitable network asynchrony, the over-dependence on a central coordinator, and the lack of an open and fair incentive mechanism collectively hinder its further development. We propose \textsc{IronForge}, a new generation of FL framework, that features a Directed Acyclic Graph (DAG)-based data structure and eliminates the need for central coordinators to achieve fully decentralized operations. \textsc{IronForge} runs in a public and open network, and launches a fair incentive mechanism by enabling state consistency in the DAG, so that the system fits in networks where training resources are unevenly distributed. In addition, dedicated defense strategies against prevalent FL attacks on incentive fairness and data privacy are presented to ensure the security of \textsc{IronForge}. Experimental results based on a newly developed testbed FLSim highlight the superiority of \textsc{IronForge} to the existing prevalent FL frameworks under various specifications in performance, fairness, and security. To the best of our knowledge, \textsc{IronForge} is the first secure and fully decentralized FL framework that can be applied in open networks with realistic network and training settings.
Uplink Sensing Using CSI Ratio in Perceptive Mobile Networks
Nov 07, 2022Uplink sensing in perceptive mobile networks (PMNs), which uses uplink communication signals for sensing the environment around a base station, faces challenging issues of clock asynchronism and the requirement of a line-of-sight (LOS) path between transmitters and receivers. The channel state information (CSI) ratio has been applied to resolve these issues, however, current research on the CSI ratio is limited to Doppler estimation in a single dynamic path. This paper proposes an advanced parameter estimation scheme that can extract multiple dynamic parameters, including Doppler frequency, angle-of-arrival (AoA), and delay, in a communication uplink channel and completes the localization of multiple moving targets. Our scheme is based on the multi-element Taylor series of the CSI ratio that converts a nonlinear function of sensing parameters to linear forms and enables the applications of traditional sensing algorithms. Using the truncated Taylor series, we develop novel multiple-signal-classification grid searching algorithms for estimating Doppler frequencies and AoAs and use the least-square method to obtain delays. Both experimental and simulation results are provided, demonstrating that our proposed scheme can achieve good performances for sensing both single and multiple dynamic paths, without requiring the presence of a LOS path.
Joint Estimation of Multipath Angles and Delays for Millimeter-Wave Cylindrical Arrays with Hybrid Front-ends
Feb 22, 2021
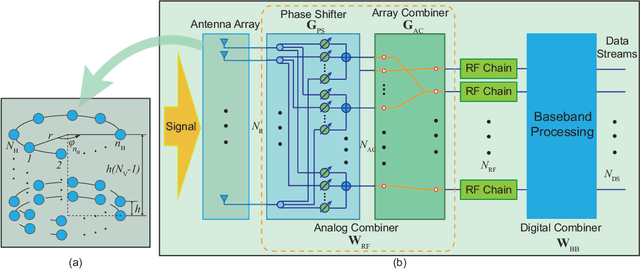
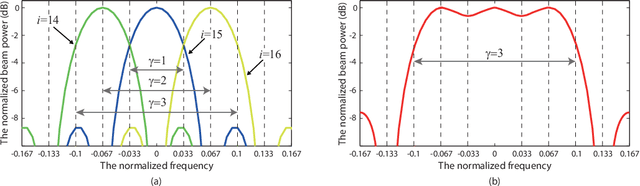

Accurate channel parameter estimation is challenging for wideband millimeter-wave (mmWave) large-scale hybrid arrays, due to beam squint and much fewer radio frequency (RF) chains than antennas. This paper presents a novel joint delay and angle estimation approach for wideband mmWave fully-connected hybrid uniform cylindrical arrays. We first design a new hybrid beamformer to reduce the dimension of received signals on the horizontal plane by exploiting the convergence of the Bessel function, and to reduce the active beams in the vertical direction through preselection. The important recurrence relationship of the received signals needed for subspace-based angle and delay estimation is preserved, even with substantially fewer RF chains than antennas. Then, linear interpolation is generalized to reconstruct the received signals of the hybrid beamformer, so that the signals can be coherently combined across the whole band to suppress the beam squint. As a result, efficient subspace-based algorithm algorithms can be developed to estimate the angles and delays of multipath components. The estimated delays and angles are further matched and correctly associated with different paths in the presence of non-negligible noises, by putting forth perturbation operations. Simulations show that the proposed approach can approach the Cram\'{e}r-Rao lower bound (CRLB) of the estimation with a significantly lower computational complexity than existing techniques.
A Multi-intersection Vehicular Cooperative Control based on End-Edge-Cloud Computing
Dec 01, 2020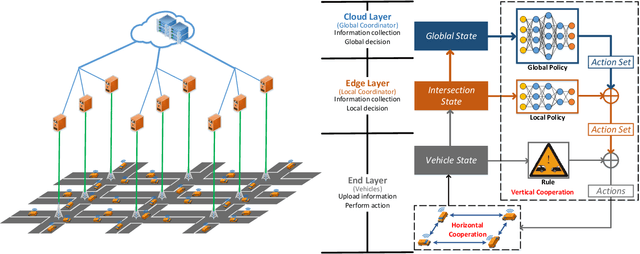
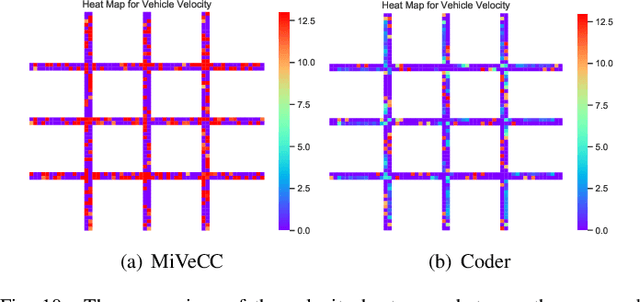
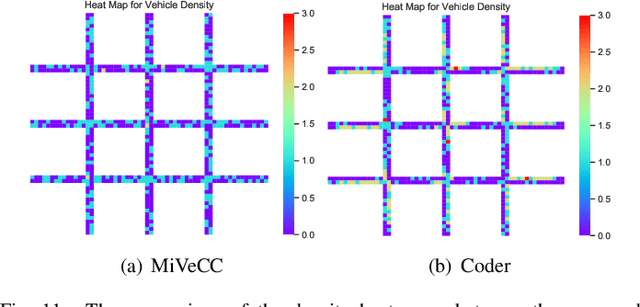
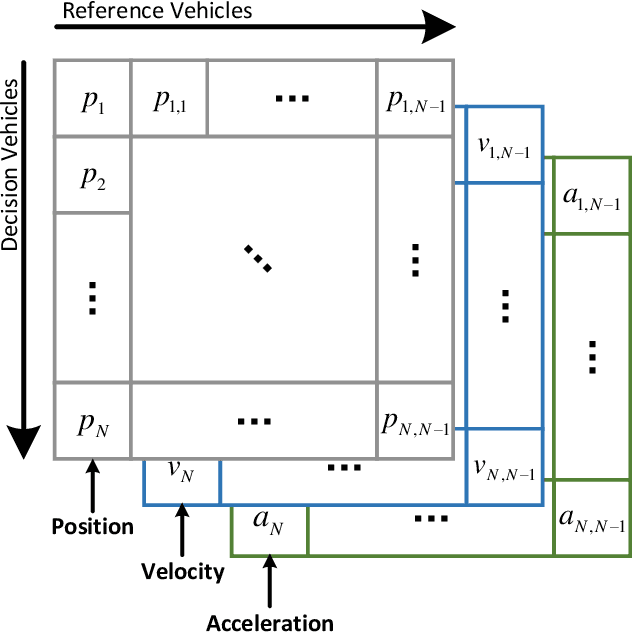
Cooperative Intelligent Transportation Systems (C-ITS) will change the modes of road safety and traffic management, especially at intersections without traffic lights, namely unsignalized intersections. Existing researches focus on vehicle control within a small area around an unsignalized intersection. In this paper, we expand the control domain to a large area with multiple intersections. In particular, we propose a Multi-intersection Vehicular Cooperative Control (MiVeCC) to enable cooperation among vehicles in a large area with multiple unsignalized intersections. Firstly, a vehicular end-edge-cloud computing framework is proposed to facilitate end-edge-cloud vertical cooperation and horizontal cooperation among vehicles. Then, the vehicular cooperative control problems in the cloud and edge layers are formulated as Markov Decision Process (MDP) and solved by two-stage reinforcement learning. Furthermore, to deal with high-density traffic, vehicle selection methods are proposed to reduce the state space and accelerate algorithm convergence without performance degradation. A multi-intersection simulation platform is developed to evaluate the proposed scheme. Simulation results show that the proposed MiVeCC can improve travel efficiency at multiple intersections by up to 4.59 times without collision compared with existing methods.