 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDensity-Aware Federated Imitation Learning for Connected and Automated Vehicles with Unsignalized Intersection
May 05, 2021

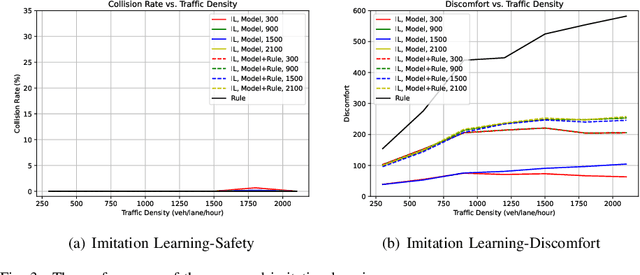
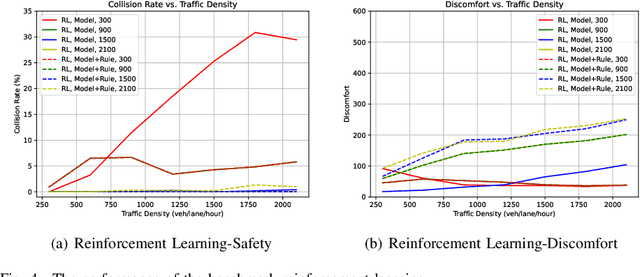
Intelligent Transportation System (ITS) has become one of the essential components in Industry 4.0. As one of the critical indicators of ITS, efficiency has attracted wide attention from researchers. However, the next generation of urban traffic carried by multiple transport service providers may prohibit the raw data interaction among multiple regions for privacy reasons, easily ignored in the existing research. This paper puts forward a federated learning-based vehicle control framework to solve the above problem, including interactors, trainers, and an aggregator. In addition, the density-aware model aggregation method is utilized in this framework to improve vehicle control. What is more, to promote the performance of the end-to-end learning algorithm in the safety aspect, this paper proposes an imitation learning algorithm, which can obtain collision avoidance capabilities from a set of collision avoidance rules. Furthermore, a loss-aware experience selection strategy is also explored, reducing the communication overhead between the interactors and the trainers via extra computing. Finally, the experiment results demonstrate that the proposed imitation learning algorithm obtains the ability to avoid collisions and reduces discomfort by 55.71%. Besides, density-aware model aggregation can further reduce discomfort by 41.37%, and the experience selection scheme can reduce the communication overhead by 12.80% while ensuring model convergence.
A Multi-intersection Vehicular Cooperative Control based on End-Edge-Cloud Computing
Dec 01, 2020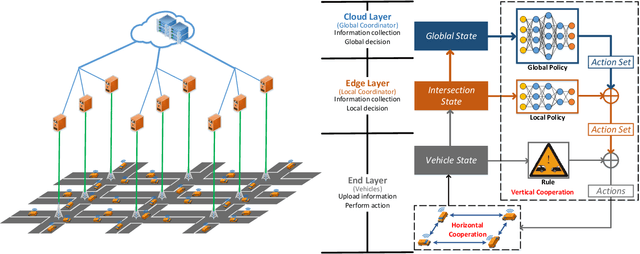
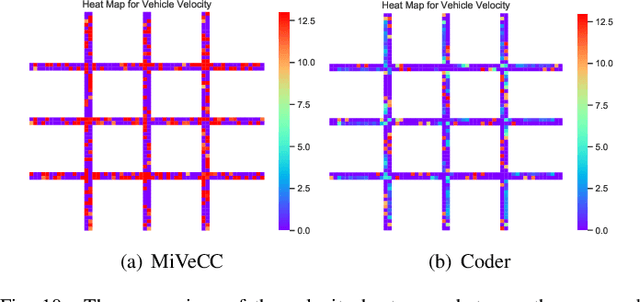
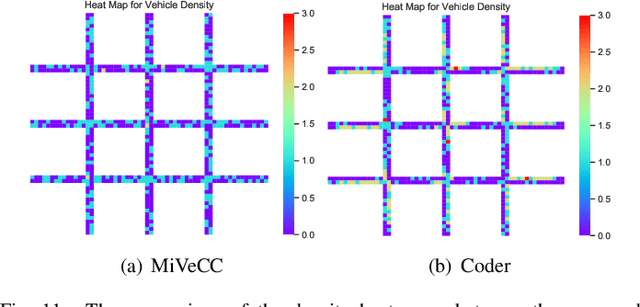
Cooperative Intelligent Transportation Systems (C-ITS) will change the modes of road safety and traffic management, especially at intersections without traffic lights, namely unsignalized intersections. Existing researches focus on vehicle control within a small area around an unsignalized intersection. In this paper, we expand the control domain to a large area with multiple intersections. In particular, we propose a Multi-intersection Vehicular Cooperative Control (MiVeCC) to enable cooperation among vehicles in a large area with multiple unsignalized intersections. Firstly, a vehicular end-edge-cloud computing framework is proposed to facilitate end-edge-cloud vertical cooperation and horizontal cooperation among vehicles. Then, the vehicular cooperative control problems in the cloud and edge layers are formulated as Markov Decision Process (MDP) and solved by two-stage reinforcement learning. Furthermore, to deal with high-density traffic, vehicle selection methods are proposed to reduce the state space and accelerate algorithm convergence without performance degradation. A multi-intersection simulation platform is developed to evaluate the proposed scheme. Simulation results show that the proposed MiVeCC can improve travel efficiency at multiple intersections by up to 4.59 times without collision compared with existing methods.