 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of an Assisted Programming Interface for Behavior Trees in Robotics
Feb 10, 2026The possibility to create reactive robot programs faster without the need for extensively trained programmers is becoming increasingly important. So far, it has not been explored how various techniques for creating Behavior Tree (BT) program representations could be combined with complete graphical user interfaces (GUIs) to allow a human user to validate and edit trees suggested by automated methods. In this paper, we introduce BEhavior TRee GUI (BETR-GUI) for creating BTs with the help of an AI assistant that combines methods using large language models, planning, genetic programming, and Bayesian optimization with a drag-and-drop editor. A user study with 60 participants shows that by combining different assistive methods, BETR-GUI enables users to perform better at solving the robot programming tasks. The results also show that humans using the full variant of BETR-GUI perform better than the AI assistant running on its own.
A Systematic Review on Reproducibility in Child-Robot Interaction
Sep 04, 2023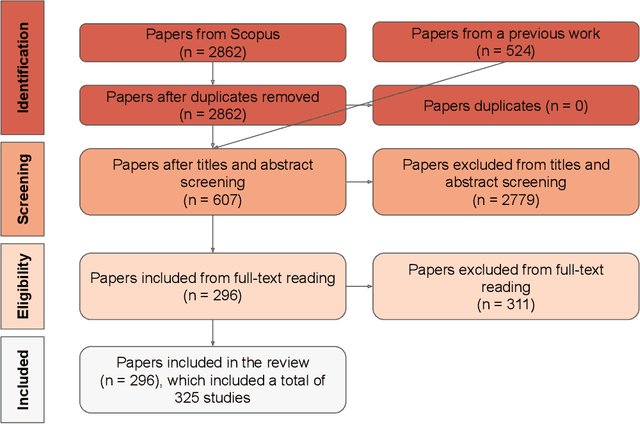
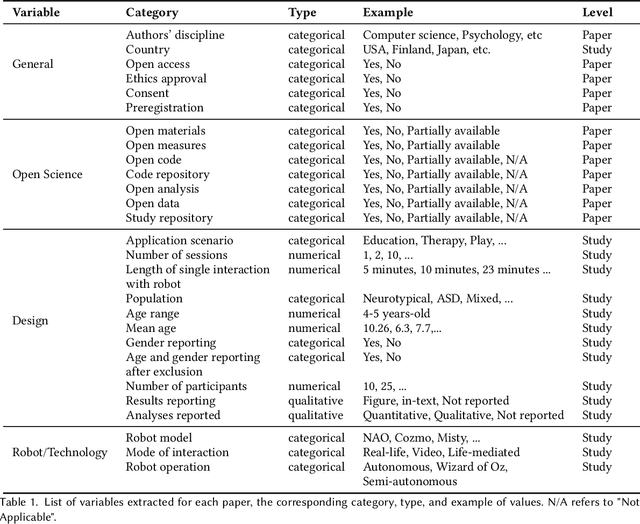
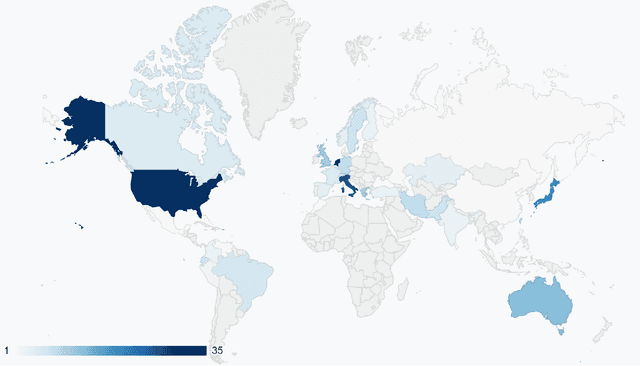
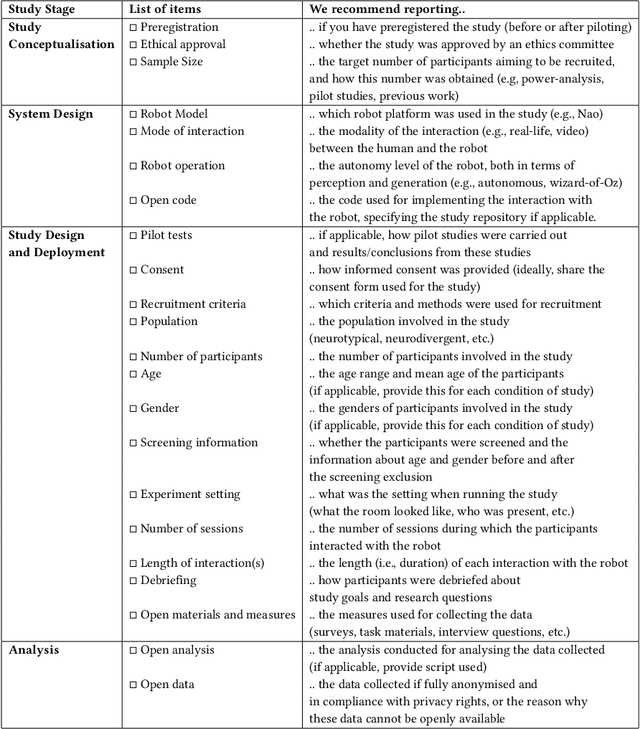
Research reproducibility - i.e., rerunning analyses on original data to replicate the results - is paramount for guaranteeing scientific validity. However, reproducibility is often very challenging, especially in research fields where multi-disciplinary teams are involved, such as child-robot interaction (CRI). This paper presents a systematic review of the last three years (2020-2022) of research in CRI under the lens of reproducibility, by analysing the field for transparency in reporting. Across a total of 325 studies, we found deficiencies in reporting demographics (e.g. age of participants), study design and implementation (e.g. length of interactions), and open data (e.g. maintaining an active code repository). From this analysis, we distill a set of guidelines and provide a checklist to systematically report CRI studies to help and guide research to improve reproducibility in CRI and beyond.
Happily Error After: Framework Development and User Study for Correcting Robot Perception Errors in Virtual Reality
Jun 26, 2023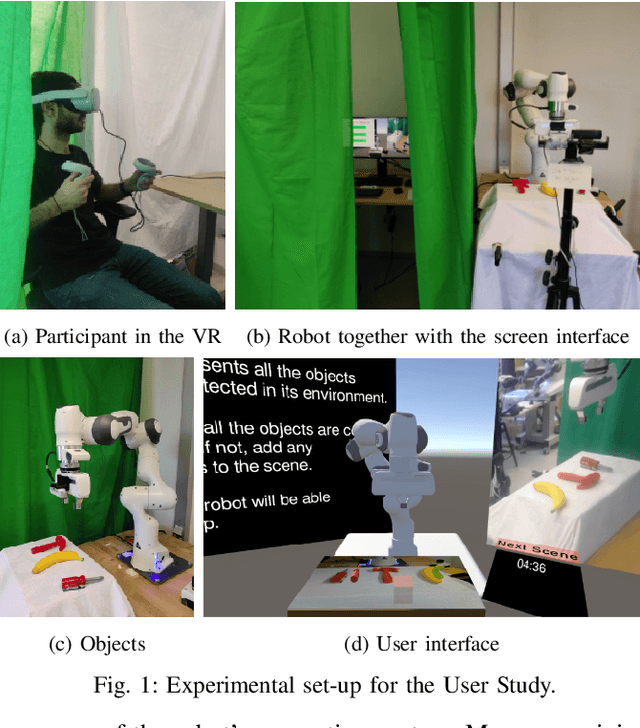
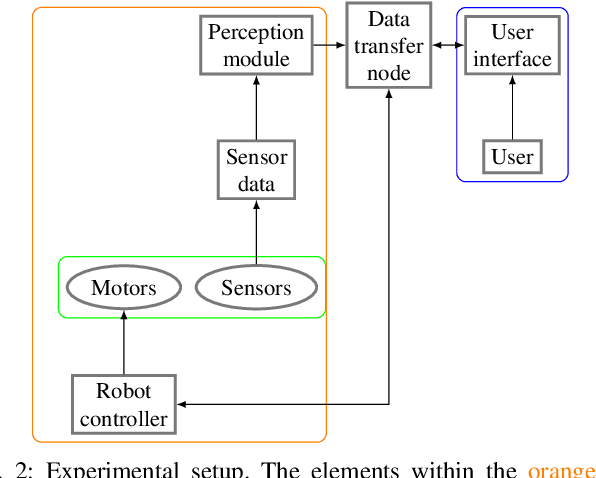
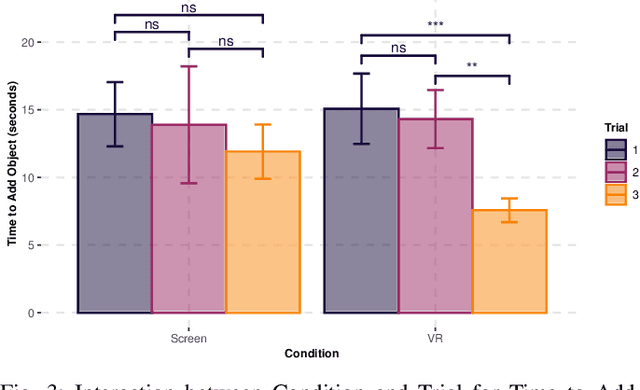
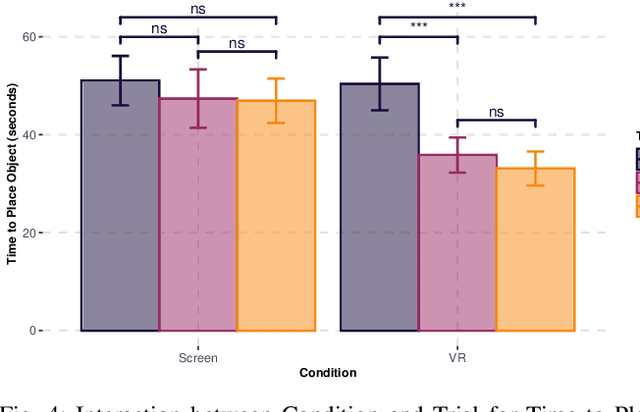
While we can see robots in more areas of our lives, they still make errors. One common cause of failure stems from the robot perception module when detecting objects. Allowing users to correct such errors can help improve the interaction and prevent the same errors in the future. Consequently, we investigate the effectiveness of a virtual reality (VR) framework for correcting perception errors of a Franka Panda robot. We conducted a user study with 56 participants who interacted with the robot using both VR and screen interfaces. Participants learned to collaborate with the robot faster in the VR interface compared to the screen interface. Additionally, participants found the VR interface more immersive, enjoyable, and expressed a preference for using it again. These findings suggest that VR interfaces may offer advantages over screen interfaces for human-robot interaction in erroneous environments.
What you see is what you get: A VR Framework for Correcting Robot Errors
Jan 17, 2023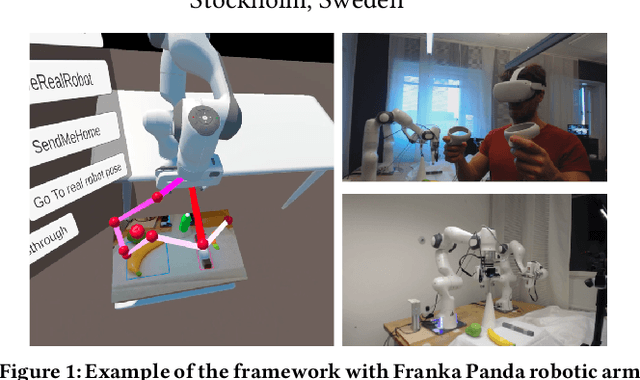
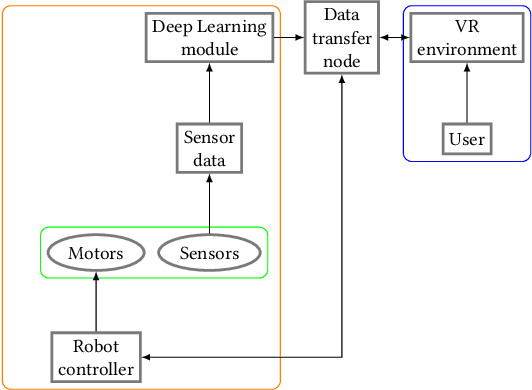
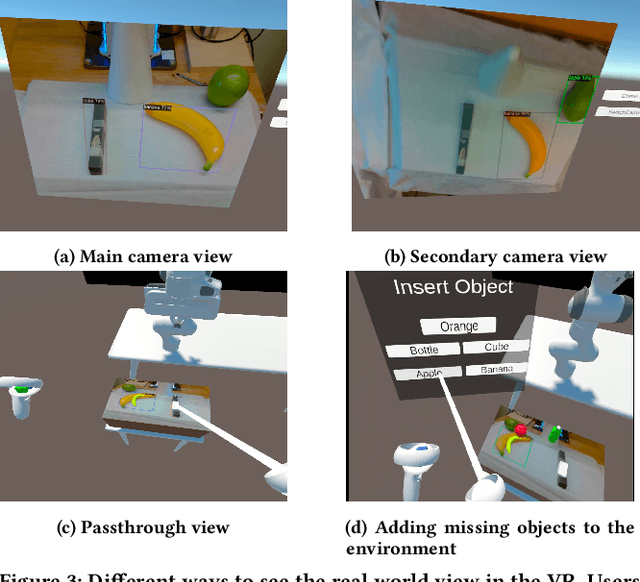
Many solutions tailored for intuitive visualization or teleoperation of virtual, augmented and mixed (VAM) reality systems are not robust to robot failures, such as the inability to detect and recognize objects in the environment or planning unsafe trajectories. In this paper, we present a novel virtual reality (VR) framework where users can (i) recognize when the robot has failed to detect a real-world object, (ii) correct the error in VR, (iii) modify proposed object trajectories and, (iv) implement behaviors on a real-world robot. Finally, we propose a user study aimed at testing the efficacy of our framework. Project materials can be found in the OSF repository.
MobiAxis: An Embodied Learning Task for Teaching Multiplication with a Social Robot
Apr 16, 2020
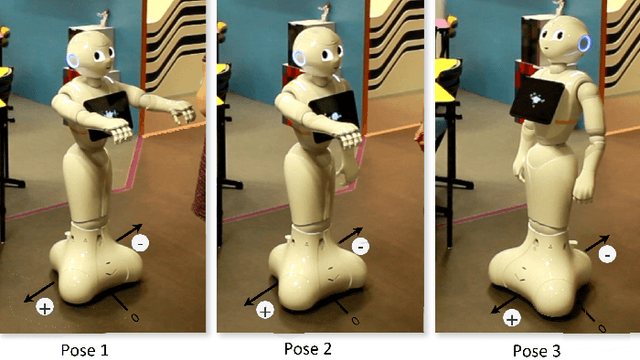
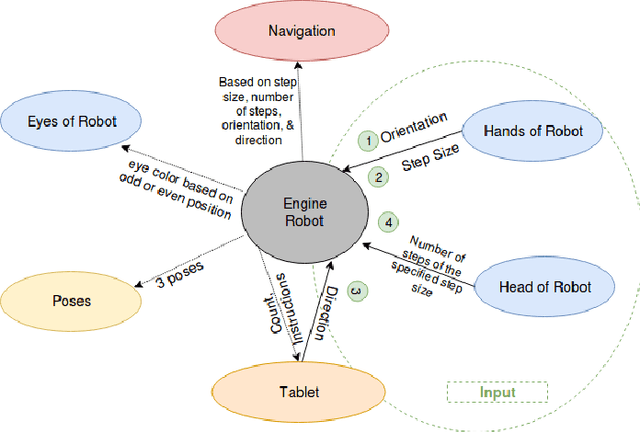
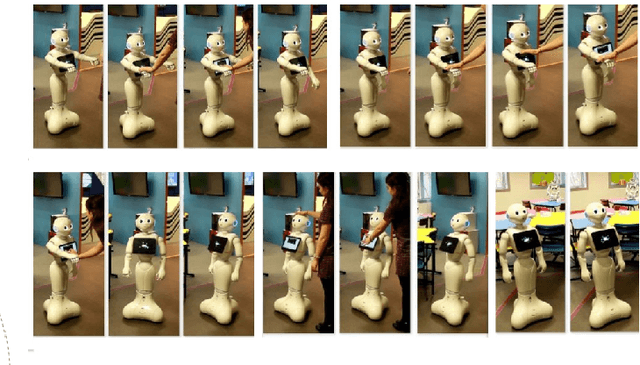
The use of robots in educational settings is growing increasingly popular. Yet, many of the learning tasks involving social robots do not take full advantage of their physical embodiment. MobiAxis is a proposed learning task which uses the physical capabilities of a Pepper robot to teach the concepts of positive and negative multiplication along a number line. The robot is embodied with a number of multi-modal socially intelligent features and behaviours which are designed to enhance learning. This paper is a position paper describing the technical and theoretical implementation of the task, as well as proposed directions for future studies.
A Robot by Any Other Frame: Framing and Behaviour Influence Mind Perception in Virtual but not Real-World Environments
Apr 16, 2020


Mind perception in robots has been an understudied construct in human-robot interaction (HRI) compared to similar concepts such as anthropomorphism and the intentional stance. In a series of three experiments, we identify two factors that could potentially influence mind perception and moral concern in robots: how the robot is introduced (framing), and how the robot acts (social behaviour). In the first two online experiments, we show that both framing and behaviour independently influence participants' mind perception. However, when we combined both variables in the following real-world experiment, these effects failed to replicate. We hence identify a third factor post-hoc: the online versus real-world nature of the interactions. After analysing potential confounds, we tentatively suggest that mind perception is harder to influence in real-world experiments, as manipulations are harder to isolate compared to virtual experiments, which only provide a slice of the interaction.