 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHappily Error After: Framework Development and User Study for Correcting Robot Perception Errors in Virtual Reality
Paper and Code
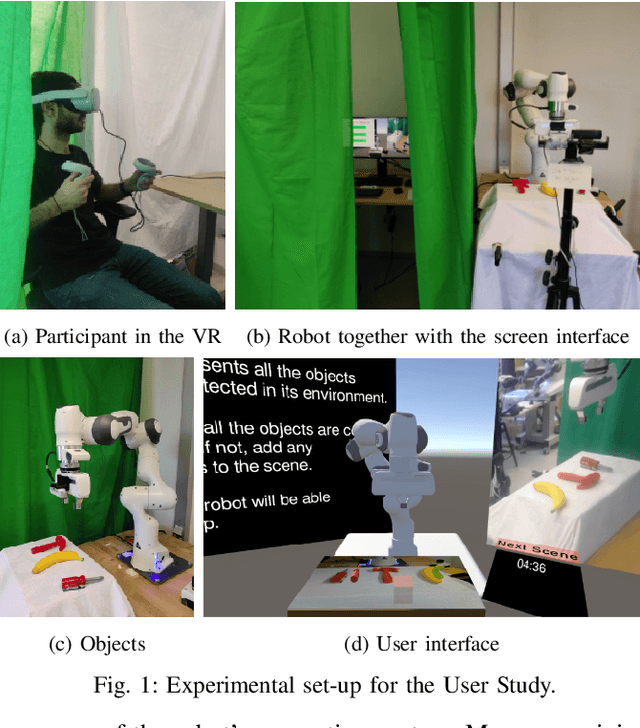
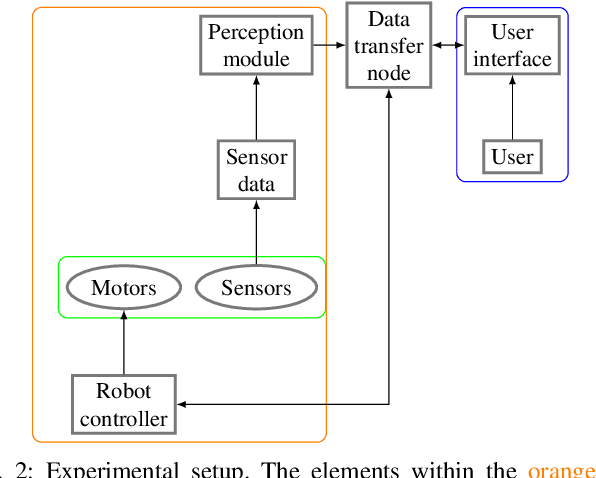
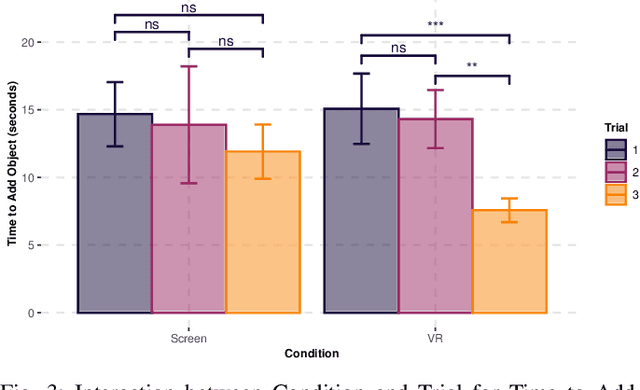
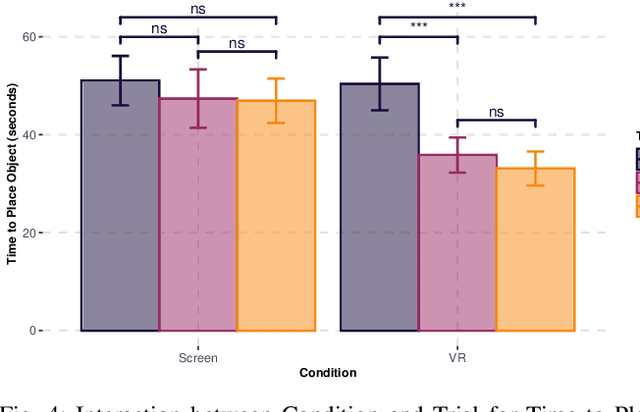
While we can see robots in more areas of our lives, they still make errors. One common cause of failure stems from the robot perception module when detecting objects. Allowing users to correct such errors can help improve the interaction and prevent the same errors in the future. Consequently, we investigate the effectiveness of a virtual reality (VR) framework for correcting perception errors of a Franka Panda robot. We conducted a user study with 56 participants who interacted with the robot using both VR and screen interfaces. Participants learned to collaborate with the robot faster in the VR interface compared to the screen interface. Additionally, participants found the VR interface more immersive, enjoyable, and expressed a preference for using it again. These findings suggest that VR interfaces may offer advantages over screen interfaces for human-robot interaction in erroneous environments.