 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntentVLM: Open-Vocabulary Intention Recognition through Forward-Inverse Modeling with Video-Language Models
Apr 27, 2026Improving the effectiveness of human-robot interaction requires social robots to accurately infer human goals through robust intention understanding. This challenge is particularly critical in multimodal settings, where agents must integrate heterogeneous signals including text, visual cues to form a coherent interpretation of user intent. This paper presents IntentVLM, a novel two-stage video-language framework designed for open-vocabulary human intention recognition. The approach is inspired by forward-inverse modeling in cognitive science by decomposing intention understanding into goal candidate generation followed by structured inference through selection, effectively reducing hallucinations in latent reasoning. Evaluated on the IntentQA and Inst-IT Bench datasets, IntentVLM achieves state-of-the-art results with up to 80% accuracy, notably surpassing the baseline performance by 30% and matches human performance. Our findings demonstrate that this structured reasoning approach enhances open-vocabulary intention understanding without catastrophic forgetting, offering a robust foundation for human-centered robotics.
Encoding Predictability and Legibility for Style-Conditioned Diffusion Policy
Mar 17, 2026Striking a balance between efficiency and transparent motion is a core challenge in human-robot collaboration, as highly expressive movements often incur unnecessary time and energy costs. In collaborative environments, legibility allows a human observer a better understanding of the robot's actions, increasing safety and trust. However, these behaviors result in sub-optimal and exaggerated trajectories that are redundant in low-ambiguity scenarios where the robot's goal is already obvious. To address this trade-off, we propose Style-Conditioned Diffusion Policy (SCDP), a modular framework that constrains the trajectory generation of a pre-trained diffusion model toward either legibility or efficiency based on the environment's configuration. Our method utilizes a post-training pipeline that freezes the base policy and trains a lightweight scene encoder and conditioning predictor to modulate the diffusion process. At inference time, an ambiguity detection module activates the appropriate conditioning, prioritizing expressive motion only for ambiguous goals and reverting to efficient paths otherwise. We evaluate SCDP on manipulation and navigation tasks, and results show that it enhances legibility in ambiguous settings while preserving optimal efficiency when legibility is unnecessary, all without retraining the base policy.
Iterative On-Policy Refinement of Hierarchical Diffusion Policies for Language-Conditioned Manipulation
Mar 05, 2026Hierarchical policies for language-conditioned manipulation decompose tasks into subgoals, where a high-level planner guides a low-level controller. However, these hierarchical agents often fail because the planner generates subgoals without considering the actual limitations of the controller. Existing solutions attempt to bridge this gap via intermediate modules or shared representations, but they remain limited by their reliance on fixed offline datasets. We propose HD-ExpIt, a framework for iterative fine-tuning of hierarchical diffusion policies via environment feedback. HD-ExpIt organizes training into a self-reinforcing cycle: it utilizes diffusion-based planning to autonomously discover successful behaviors, which are then distilled back into the hierarchical policy. This loop enables both components to improve while implicitly grounding the planner in the controller's actual capabilities without requiring explicit proxy models. Empirically, HD-ExpIt significantly improves hierarchical policies trained solely on offline data, achieving state-of-the-art performance on the long-horizon CALVIN benchmark among methods trained from scratch.
CLUE: Crossmodal disambiguation via Language-vision Understanding with attEntion
Feb 09, 2026With the increasing integration of robots into daily life, human-robot interaction has become more complex and multifaceted. A critical component of this interaction is Interactive Visual Grounding (IVG), through which robots must interpret human intentions and resolve ambiguity. Existing IVG models generally lack a mechanism to determine when to ask clarification questions, as they implicitly rely on their learned representations. CLUE addresses this gap by converting the VLM's cross-modal attention into an explicit, spatially grounded signal for deciding when to ask. We extract text to image attention maps and pass them to a lightweight CNN to detect referential ambiguity, while a LoRA fine-tuned decoder conducts the dialog and emits grounding location tokens. We train on a real-world interactive dataset for IVG, and a mixed ambiguity set for the detector. With InViG-only supervision, our model surpasses a state-of-the-art method while using parameter-efficient fine-tuning. Similarly, the ambiguity detector outperforms prior baselines. Overall, CLUE turns the internal cross-modal attention of a VLM into an explicit, spatially grounded signal for deciding when to ask. The data and code are publicly available at: mouadabrini.github.io/clue
HARMONI: Multimodal Personalization of Multi-User Human-Robot Interactions with LLMs
Jan 27, 2026Existing human-robot interaction systems often lack mechanisms for sustained personalization and dynamic adaptation in multi-user environments, limiting their effectiveness in real-world deployments. We present HARMONI, a multimodal personalization framework that leverages large language models to enable socially assistive robots to manage long-term multi-user interactions. The framework integrates four key modules: (i) a perception module that identifies active speakers and extracts multimodal input; (ii) a world modeling module that maintains representations of the environment and short-term conversational context; (iii) a user modeling module that updates long-term speaker-specific profiles; and (iv) a generation module that produces contextually grounded and ethically informed responses. Through extensive evaluation and ablation studies on four datasets, as well as a real-world scenario-driven user-study in a nursing home environment, we demonstrate that HARMONI supports robust speaker identification, online memory updating, and ethically aligned personalization, outperforming baseline LLM-driven approaches in user modeling accuracy, personalization quality, and user satisfaction.
Controlling Intent Expressiveness in Robot Motion with Diffusion Models
Oct 14, 2025



Legibility of robot motion is critical in human-robot interaction, as it allows humans to quickly infer a robot's intended goal. Although traditional trajectory generation methods typically prioritize efficiency, they often fail to make the robot's intentions clear to humans. Meanwhile, existing approaches to legible motion usually produce only a single "most legible" trajectory, overlooking the need to modulate intent expressiveness in different contexts. In this work, we propose a novel motion generation framework that enables controllable legibility across the full spectrum, from highly legible to highly ambiguous motions. We introduce a modeling approach based on an Information Potential Field to assign continuous legibility scores to trajectories, and build upon it with a two-stage diffusion framework that first generates paths at specified legibility levels and then translates them into executable robot actions. Experiments in both 2D and 3D reaching tasks demonstrate that our approach produces diverse and controllable motions with varying degrees of legibility, while achieving performance comparable to SOTA. Code and project page: https://legibility-modulator.github.io.
I-FailSense: Towards General Robotic Failure Detection with Vision-Language Models
Sep 19, 2025Language-conditioned robotic manipulation in open-world settings requires not only accurate task execution but also the ability to detect failures for robust deployment in real-world environments. Although recent advances in vision-language models (VLMs) have significantly improved the spatial reasoning and task-planning capabilities of robots, they remain limited in their ability to recognize their own failures. In particular, a critical yet underexplored challenge lies in detecting semantic misalignment errors, where the robot executes a task that is semantically meaningful but inconsistent with the given instruction. To address this, we propose a method for building datasets targeting Semantic Misalignment Failures detection, from existing language-conditioned manipulation datasets. We also present I-FailSense, an open-source VLM framework with grounded arbitration designed specifically for failure detection. Our approach relies on post-training a base VLM, followed by training lightweight classification heads, called FS blocks, attached to different internal layers of the VLM and whose predictions are aggregated using an ensembling mechanism. Experiments show that I-FailSense outperforms state-of-the-art VLMs, both comparable in size and larger, in detecting semantic misalignment errors. Notably, despite being trained only on semantic misalignment detection, I-FailSense generalizes to broader robotic failure categories and effectively transfers to other simulation environments and real-world with zero-shot or minimal post-training. The datasets and models are publicly released on HuggingFace (Webpage: https://clemgris.github.io/I-FailSense/).
Gauging Overprecision in LLMs: An Empirical Study
Apr 16, 2025

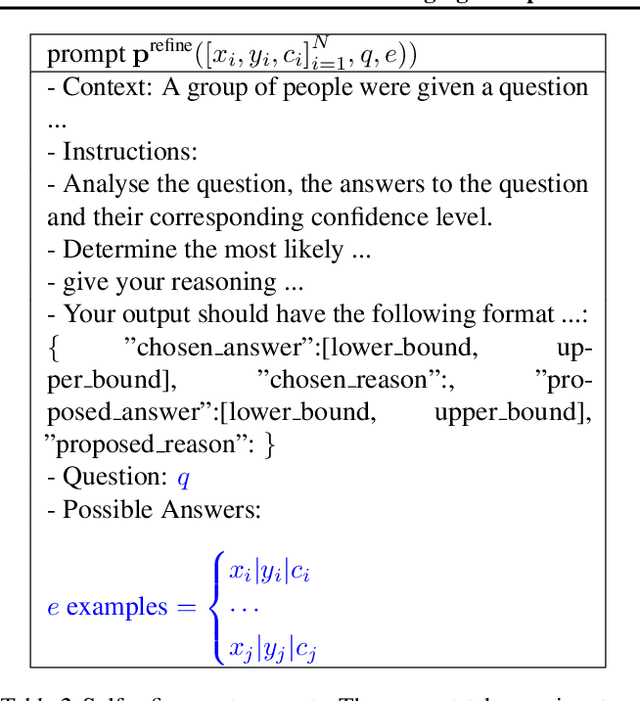

Recently, overconfidence in large language models (LLMs) has garnered considerable attention due to its fundamental importance in quantifying the trustworthiness of LLM generation. However, existing approaches prompt the \textit{black box LLMs} to produce their confidence (\textit{verbalized confidence}), which can be subject to many biases and hallucinations. Inspired by a different aspect of overconfidence in cognitive science called \textit{overprecision}, we designed a framework for its study in black box LLMs. This framework contains three main phases: 1) generation, 2) refinement and 3) evaluation. In the generation phase we prompt the LLM to generate answers to numerical questions in the form of intervals with a certain level of confidence. This confidence level is imposed in the prompt and not required for the LLM to generate as in previous approaches. We use various prompting techniques and use the same prompt multiple times to gauge the effects of randomness in the generation process. In the refinement phase, answers from the previous phase are refined to generate better answers. The LLM answers are evaluated and studied in the evaluation phase to understand its internal workings. This study allowed us to gain various insights into LLM overprecision: 1) LLMs are highly uncalibrated for numerical tasks 2) {\color{blue}there is no correlation between the length of the interval and the imposed confidence level, which can be symptomatic of a a) lack of understanding of the concept of confidence or b) inability to adjust self-confidence by following instructions}, {\color{blue}3)} LLM numerical precision differs depending on the task, scale of answer and prompting technique {\color{blue}4) Refinement of answers doesn't improve precision in most cases}. We believe this study offers new perspectives on LLM overconfidence and serves as a strong baseline for overprecision in LLMs.
Reasoning LLMs for User-Aware Multimodal Conversational Agents
Apr 02, 2025Personalization in social robotics is critical for fostering effective human-robot interactions, yet systems often face the cold start problem, where initial user preferences or characteristics are unavailable. This paper proposes a novel framework called USER-LLM R1 for a user-aware conversational agent that addresses this challenge through dynamic user profiling and model initiation. Our approach integrates chain-of-thought (CoT) reasoning models to iteratively infer user preferences and vision-language models (VLMs) to initialize user profiles from multimodal inputs, enabling personalized interactions from the first encounter. Leveraging a Retrieval-Augmented Generation (RAG) architecture, the system dynamically refines user representations within an inherent CoT process, ensuring contextually relevant and adaptive responses. Evaluations on the ElderlyTech-VQA Bench demonstrate significant improvements in ROUGE-1 (+23.2%), ROUGE-2 (+0.6%), and ROUGE-L (+8%) F1 scores over state-of-the-art baselines, with ablation studies underscoring the impact of reasoning model size on performance. Human evaluations further validate the framework's efficacy, particularly for elderly users, where tailored responses enhance engagement and trust. Ethical considerations, including privacy preservation and bias mitigation, are rigorously discussed and addressed to ensure responsible deployment.
VIPER: Visual Perception and Explainable Reasoning for Sequential Decision-Making
Mar 19, 2025While Large Language Models (LLMs) excel at reasoning on text and Vision-Language Models (VLMs) are highly effective for visual perception, applying those models for visual instruction-based planning remains a widely open problem. In this paper, we introduce VIPER, a novel framework for multimodal instruction-based planning that integrates VLM-based perception with LLM-based reasoning. Our approach uses a modular pipeline where a frozen VLM generates textual descriptions of image observations, which are then processed by an LLM policy to predict actions based on the task goal. We fine-tune the reasoning module using behavioral cloning and reinforcement learning, improving our agent's decision-making capabilities. Experiments on the ALFWorld benchmark show that VIPER significantly outperforms state-of-the-art visual instruction-based planners while narrowing the gap with purely text-based oracles. By leveraging text as an intermediate representation, VIPER also enhances explainability, paving the way for a fine-grained analysis of perception and reasoning components.