 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHARMONI: Multimodal Personalization of Multi-User Human-Robot Interactions with LLMs
Jan 27, 2026Existing human-robot interaction systems often lack mechanisms for sustained personalization and dynamic adaptation in multi-user environments, limiting their effectiveness in real-world deployments. We present HARMONI, a multimodal personalization framework that leverages large language models to enable socially assistive robots to manage long-term multi-user interactions. The framework integrates four key modules: (i) a perception module that identifies active speakers and extracts multimodal input; (ii) a world modeling module that maintains representations of the environment and short-term conversational context; (iii) a user modeling module that updates long-term speaker-specific profiles; and (iv) a generation module that produces contextually grounded and ethically informed responses. Through extensive evaluation and ablation studies on four datasets, as well as a real-world scenario-driven user-study in a nursing home environment, we demonstrate that HARMONI supports robust speaker identification, online memory updating, and ethically aligned personalization, outperforming baseline LLM-driven approaches in user modeling accuracy, personalization quality, and user satisfaction.
Reasoning LLMs for User-Aware Multimodal Conversational Agents
Apr 02, 2025Personalization in social robotics is critical for fostering effective human-robot interactions, yet systems often face the cold start problem, where initial user preferences or characteristics are unavailable. This paper proposes a novel framework called USER-LLM R1 for a user-aware conversational agent that addresses this challenge through dynamic user profiling and model initiation. Our approach integrates chain-of-thought (CoT) reasoning models to iteratively infer user preferences and vision-language models (VLMs) to initialize user profiles from multimodal inputs, enabling personalized interactions from the first encounter. Leveraging a Retrieval-Augmented Generation (RAG) architecture, the system dynamically refines user representations within an inherent CoT process, ensuring contextually relevant and adaptive responses. Evaluations on the ElderlyTech-VQA Bench demonstrate significant improvements in ROUGE-1 (+23.2%), ROUGE-2 (+0.6%), and ROUGE-L (+8%) F1 scores over state-of-the-art baselines, with ablation studies underscoring the impact of reasoning model size on performance. Human evaluations further validate the framework's efficacy, particularly for elderly users, where tailored responses enhance engagement and trust. Ethical considerations, including privacy preservation and bias mitigation, are rigorously discussed and addressed to ensure responsible deployment.
Socially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
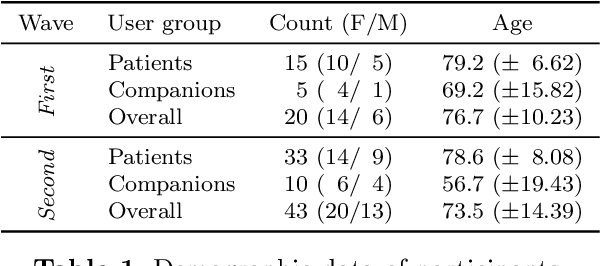
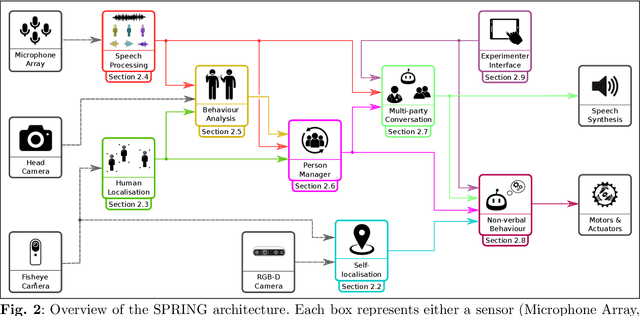
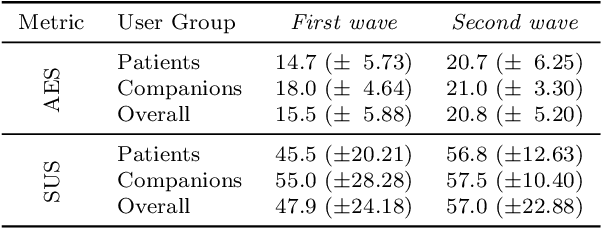
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.