 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo ways to make your robot proactive: reasoning about human intentions, or reasoning about possible futures
May 11, 2022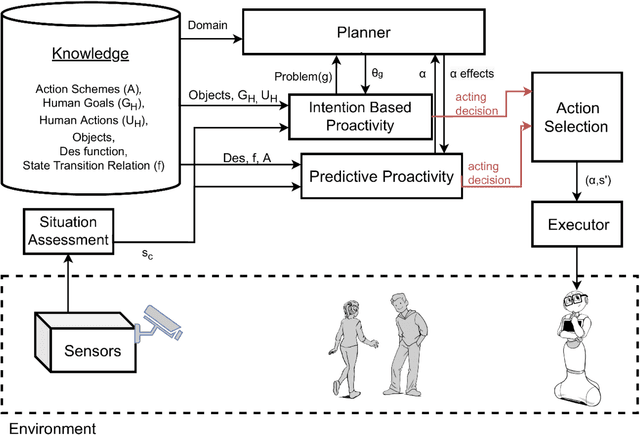
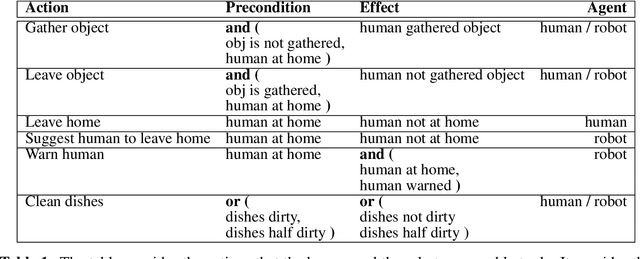
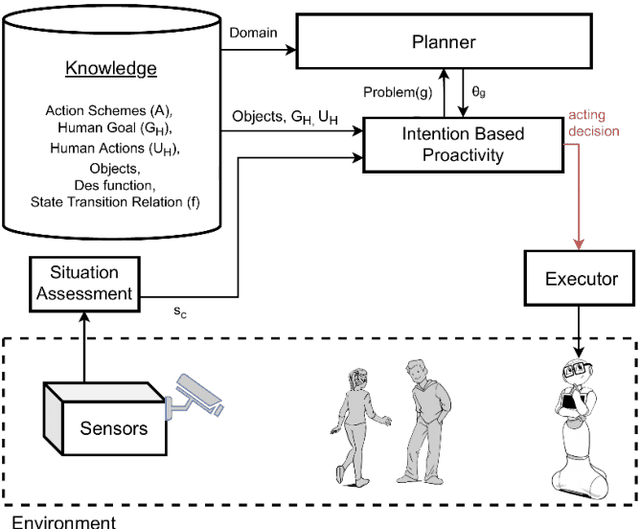

Robots sharing their space with humans need to be proactive in order to be helpful. Proactive robots are able to act on their own initiative in an anticipatory way to benefit humans. In this work, we investigate two ways to make robots proactive. One way is to recognize humans' intentions and to act to fulfill them, like opening the door that you are about to cross. The other way is to reason about possible future threats or opportunities and to act to prevent or to foster them, like recommending you to take an umbrella since rain has been forecasted. In this paper, we present approaches to realize these two types of proactive behavior. We then present an integrated system that can generate proactive robot behavior by reasoning on both factors: intentions and predictions. We illustrate our system on a sample use case including a domestic robot and a human. We first run this use case with the two separate proactive systems, intention-based and prediction-based, and then run it with our integrated system. The results show that the integrated system is able to take into account a broader variety of aspects that are needed for proactivity.
MobiAxis: An Embodied Learning Task for Teaching Multiplication with a Social Robot
Apr 16, 2020
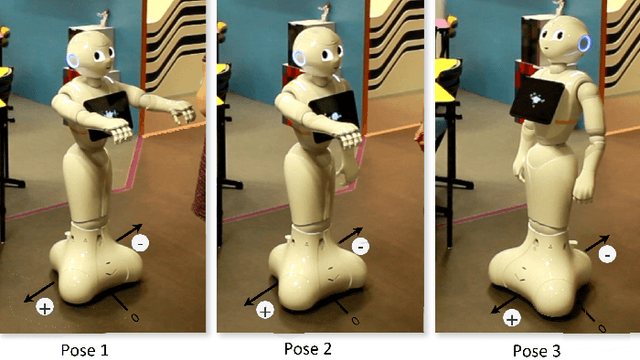
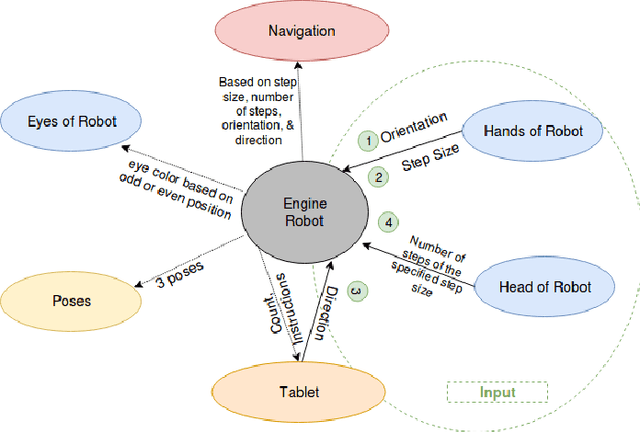
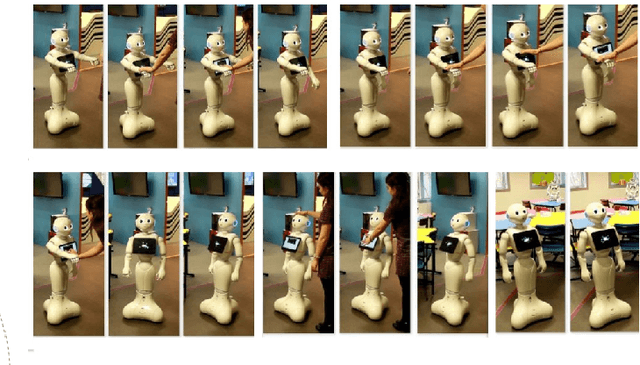
The use of robots in educational settings is growing increasingly popular. Yet, many of the learning tasks involving social robots do not take full advantage of their physical embodiment. MobiAxis is a proposed learning task which uses the physical capabilities of a Pepper robot to teach the concepts of positive and negative multiplication along a number line. The robot is embodied with a number of multi-modal socially intelligent features and behaviours which are designed to enhance learning. This paper is a position paper describing the technical and theoretical implementation of the task, as well as proposed directions for future studies.