 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Framework for Collaborative Artificial Intelligence
Dec 14, 2022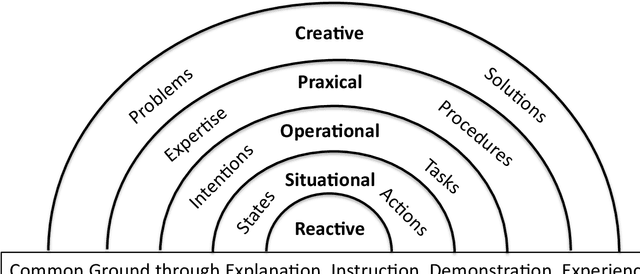
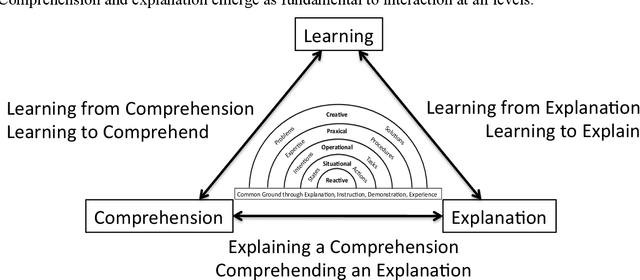
We propose a hierarchical framework for collaborative intelligent systems. This framework organizes research challenges based on the nature of the collaborative activity and the information that must be shared, with each level building on capabilities provided by lower levels. We review research paradigms at each level, with a description of classical engineering-based approaches and modern alternatives based on machine learning, illustrated with a running example using a hypothetical personal service robot. We discuss cross-cutting issues that occur at all levels, focusing on the problem of communicating and sharing comprehension, the role of explanation and the social nature of collaboration. We conclude with a summary of research challenges and a discussion of the potential for economic and societal impact provided by technologies that enhance human abilities and empower people and society through collaboration with Intelligent Systems.
Two ways to make your robot proactive: reasoning about human intentions, or reasoning about possible futures
May 11, 2022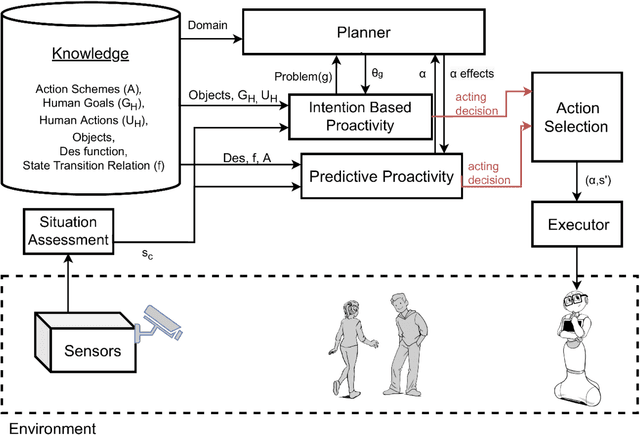
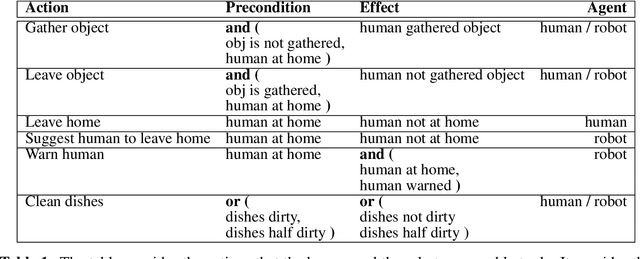
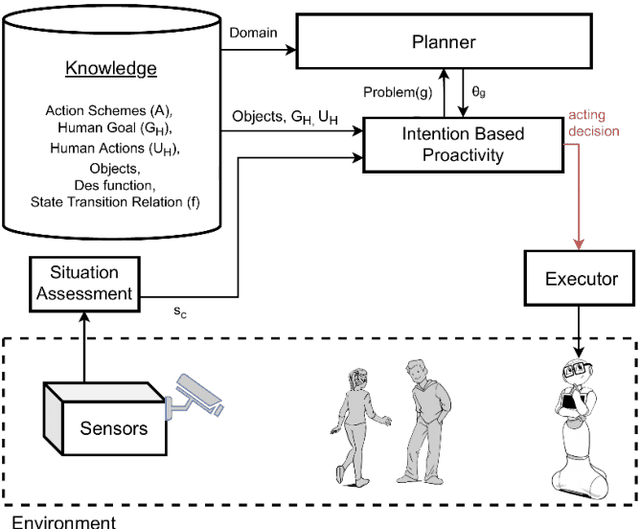

Robots sharing their space with humans need to be proactive in order to be helpful. Proactive robots are able to act on their own initiative in an anticipatory way to benefit humans. In this work, we investigate two ways to make robots proactive. One way is to recognize humans' intentions and to act to fulfill them, like opening the door that you are about to cross. The other way is to reason about possible future threats or opportunities and to act to prevent or to foster them, like recommending you to take an umbrella since rain has been forecasted. In this paper, we present approaches to realize these two types of proactive behavior. We then present an integrated system that can generate proactive robot behavior by reasoning on both factors: intentions and predictions. We illustrate our system on a sample use case including a domestic robot and a human. We first run this use case with the two separate proactive systems, intention-based and prediction-based, and then run it with our integrated system. The results show that the integrated system is able to take into account a broader variety of aspects that are needed for proactivity.
Composing Complex and Hybrid AI Solutions
Feb 25, 2022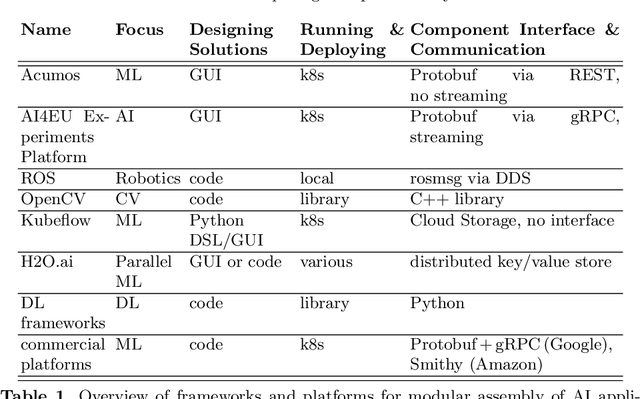
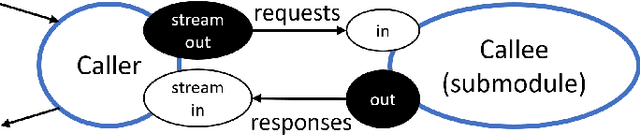
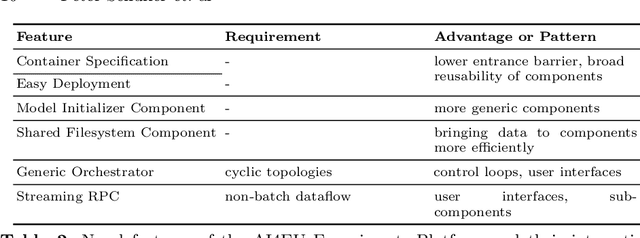
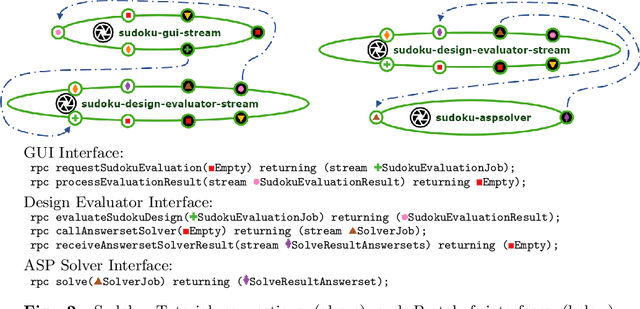
Progress in several areas of computer science has been enabled by comfortable and efficient means of experimentation, clear interfaces, and interchangable components, for example using OpenCV for computer vision or ROS for robotics. We describe an extension of the Acumos system towards enabling the above features for general AI applications. Originally, Acumos was created for telecommunication purposes, mainly for creating linear pipelines of machine learning components. Our extensions include support for more generic components with gRPC/Protobuf interfaces, automatic orchestration of graphically assembled solutions including control loops, sub-component topologies, and event-based communication,and provisions for assembling solutions which contain user interfaces and shared storage areas. We provide examples of deployable solutions and their interfaces. The framework is deployed at http://aiexp.ai4europe.eu/ and its source code is managed as an open source Eclipse project.
On some Foundational Aspects of Human-Centered Artificial Intelligence
Dec 29, 2021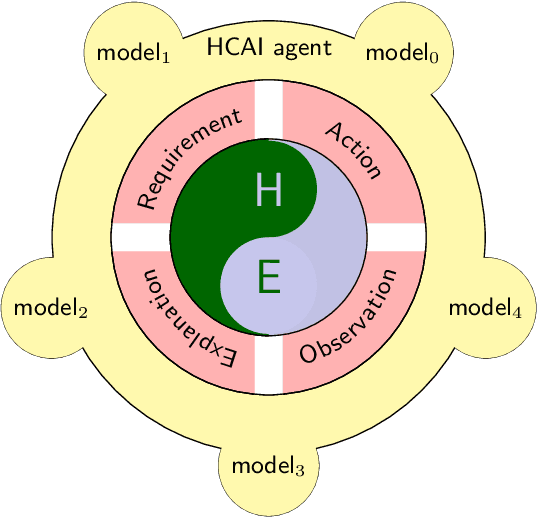
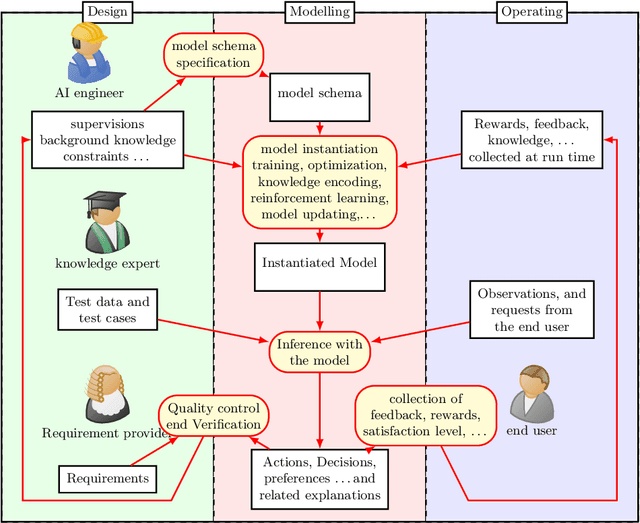
The burgeoning of AI has prompted recommendations that AI techniques should be "human-centered". However, there is no clear definition of what is meant by Human Centered Artificial Intelligence, or for short, HCAI. This paper aims to improve this situation by addressing some foundational aspects of HCAI. To do so, we introduce the term HCAI agent to refer to any physical or software computational agent equipped with AI components and that interacts and/or collaborates with humans. This article identifies five main conceptual components that participate in an HCAI agent: Observations, Requirements, Actions, Explanations and Models. We see the notion of HCAI agent, together with its components and functions, as a way to bridge the technical and non-technical discussions on human-centered AI. In this paper, we focus our analysis on scenarios consisting of a single agent operating in dynamic environments in presence of humans.