 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposing Complex and Hybrid AI Solutions
Feb 25, 2022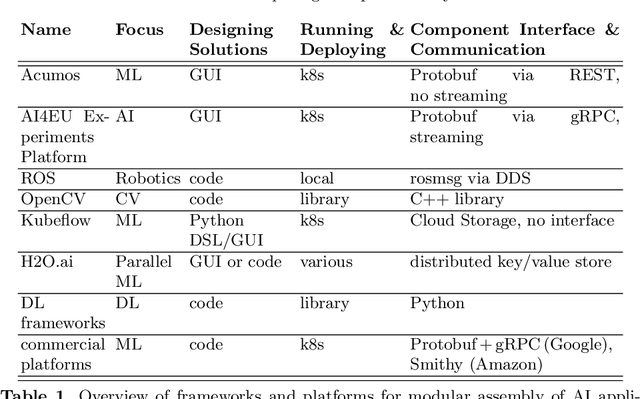
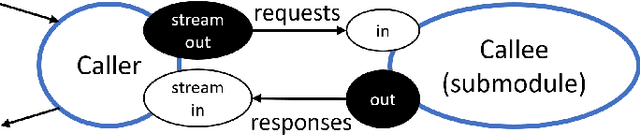
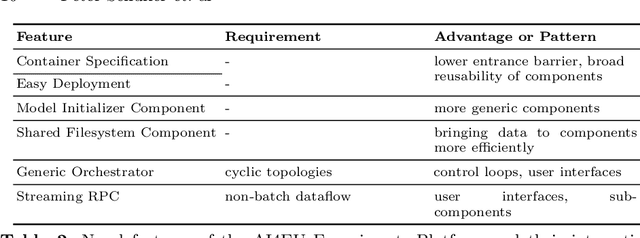
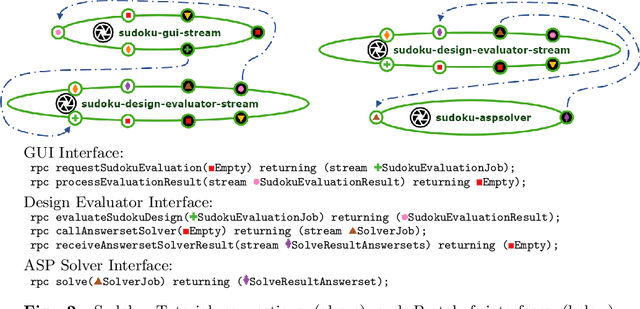
Progress in several areas of computer science has been enabled by comfortable and efficient means of experimentation, clear interfaces, and interchangable components, for example using OpenCV for computer vision or ROS for robotics. We describe an extension of the Acumos system towards enabling the above features for general AI applications. Originally, Acumos was created for telecommunication purposes, mainly for creating linear pipelines of machine learning components. Our extensions include support for more generic components with gRPC/Protobuf interfaces, automatic orchestration of graphically assembled solutions including control loops, sub-component topologies, and event-based communication,and provisions for assembling solutions which contain user interfaces and shared storage areas. We provide examples of deployable solutions and their interfaces. The framework is deployed at http://aiexp.ai4europe.eu/ and its source code is managed as an open source Eclipse project.
Online Guest Detection in a Smart Home using Pervasive Sensors and Probabilistic Reasoning
Mar 13, 2020
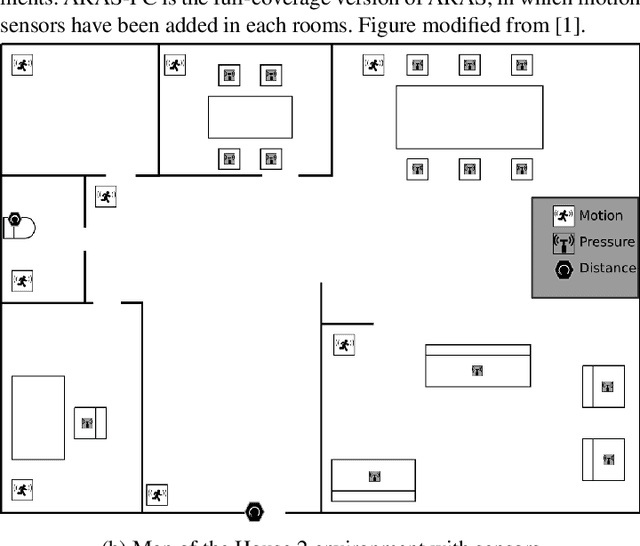
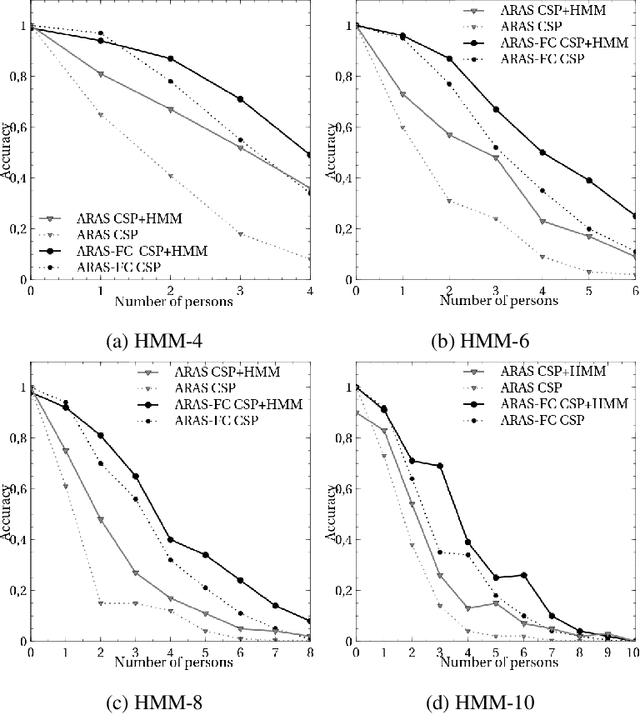
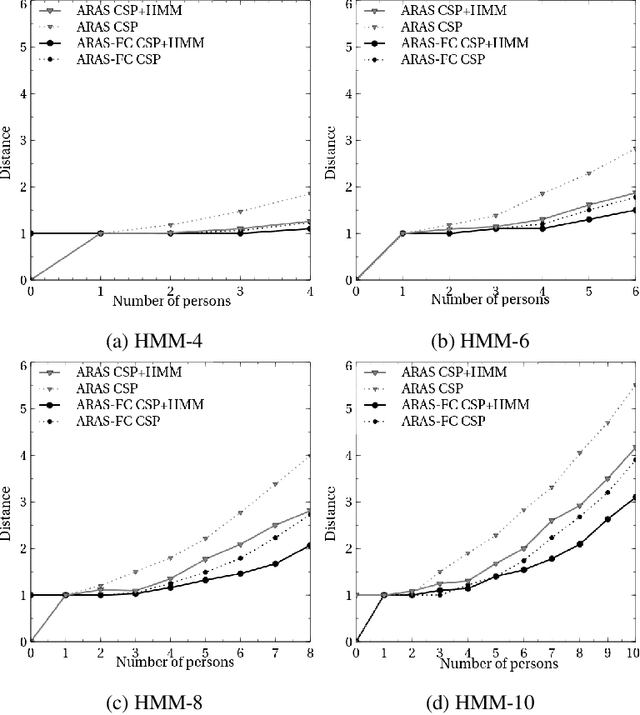
Smart home environments equipped with distributed sensor networks are capable of helping people by providing services related to health, emergency detection or daily routine management. A backbone to these systems relies often on the system's ability to track and detect activities performed by the users in their home. Despite the continuous progress in the area of activity recognition in smart homes, many systems make a strong underlying assumption that the number of occupants in the home at any given moment of time is always known. Estimating the number of persons in a Smart Home at each time step remains a challenge nowadays. Indeed, unlike most (crowd) counting solution which are based on computer vision techniques, the sensors considered in a Smart Home are often very simple and do not offer individually a good overview of the situation. The data gathered needs therefore to be fused in order to infer useful information. This paper aims at addressing this challenge and presents a probabilistic approach able to estimate the number of persons in the environment at each time step. This approach works in two steps: first, an estimate of the number of persons present in the environment is done using a Constraint Satisfaction Problem solver, based on the topology of the sensor network and the sensor activation pattern at this time point. Then, a Hidden Markov Model refines this estimate by considering the uncertainty related to the sensors. Using both simulated and real data, our method has been tested and validated on two smart homes of different sizes and configuration and demonstrates the ability to accurately estimate the number of inhabitants.