 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROSKILL: A formal skill language for acting in robotics
Mar 12, 2024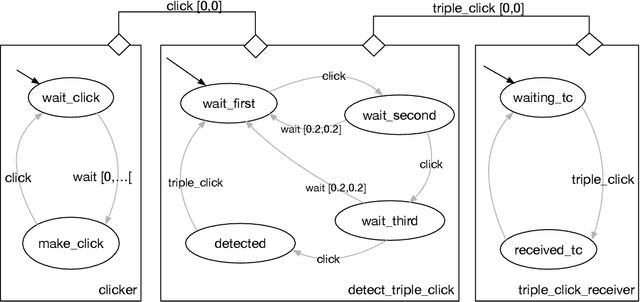
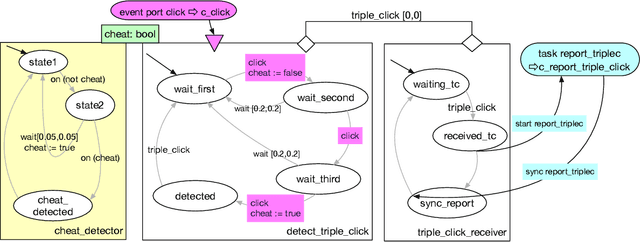
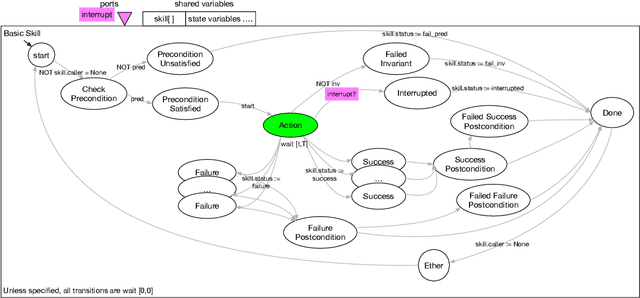
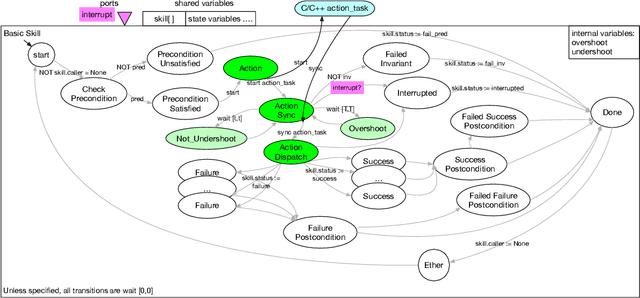
Acting is an important decisional function for autonomous robots. Acting relies on skills to implement and to model the activities it oversees: refinement, local recovery, temporal dispatching, external asynchronous events, and commands execution, all done online. While sitting between planning and the robotic platform, acting often relies on programming primitives and an interpreter which executes these skills. Following our experience in providing a formal framework to program the functional components of our robots, we propose a new language, to program the acting skills. This language maps unequivocally into a formal model which can then be used to check properties offline or execute the skills, or more precisely their formal equivalent, and perform runtime verification. We illustrate with a real example how we can program a survey mission for a drone in this new language, prove some formal properties on the program and directly execute the formal model on the drone to perform the mission.
Composing Complex and Hybrid AI Solutions
Feb 25, 2022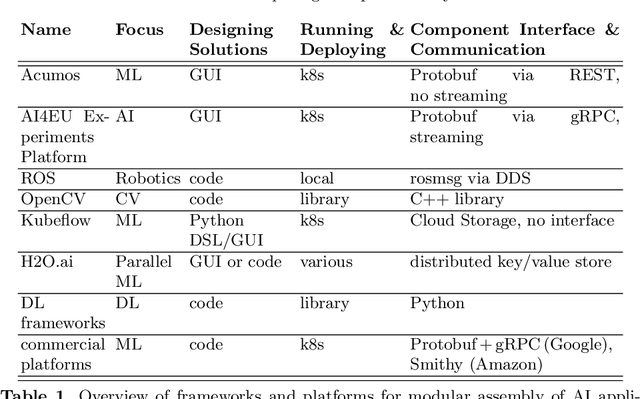
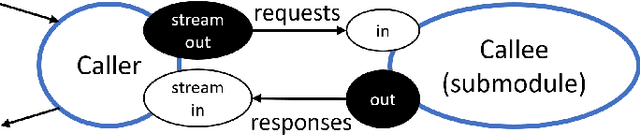
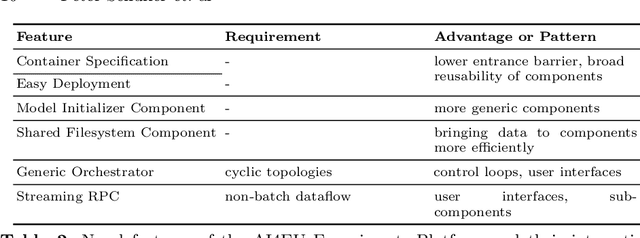
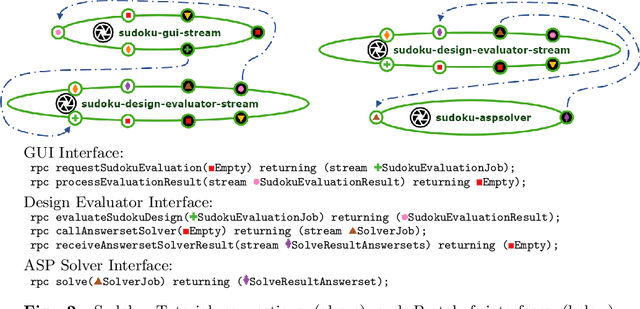
Progress in several areas of computer science has been enabled by comfortable and efficient means of experimentation, clear interfaces, and interchangable components, for example using OpenCV for computer vision or ROS for robotics. We describe an extension of the Acumos system towards enabling the above features for general AI applications. Originally, Acumos was created for telecommunication purposes, mainly for creating linear pipelines of machine learning components. Our extensions include support for more generic components with gRPC/Protobuf interfaces, automatic orchestration of graphically assembled solutions including control loops, sub-component topologies, and event-based communication,and provisions for assembling solutions which contain user interfaces and shared storage areas. We provide examples of deployable solutions and their interfaces. The framework is deployed at http://aiexp.ai4europe.eu/ and its source code is managed as an open source Eclipse project.
FAPE: a Constraint-based Planner for Generative and Hierarchical Temporal Planning
Oct 25, 2020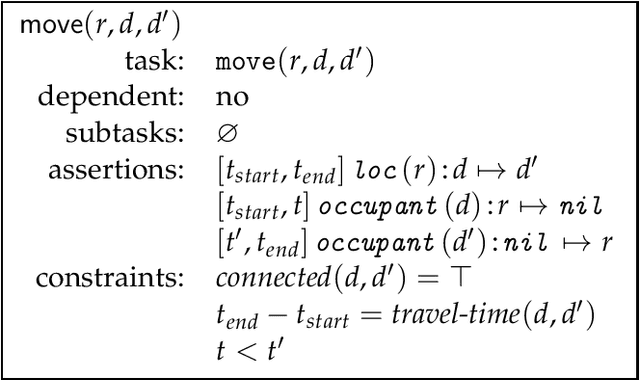
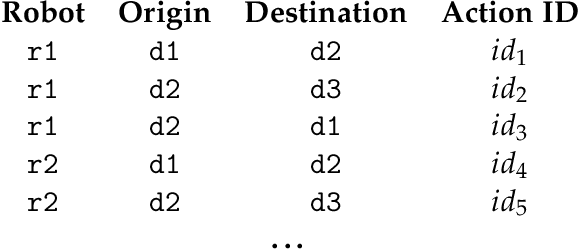
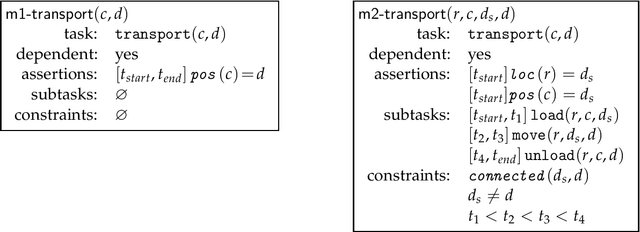
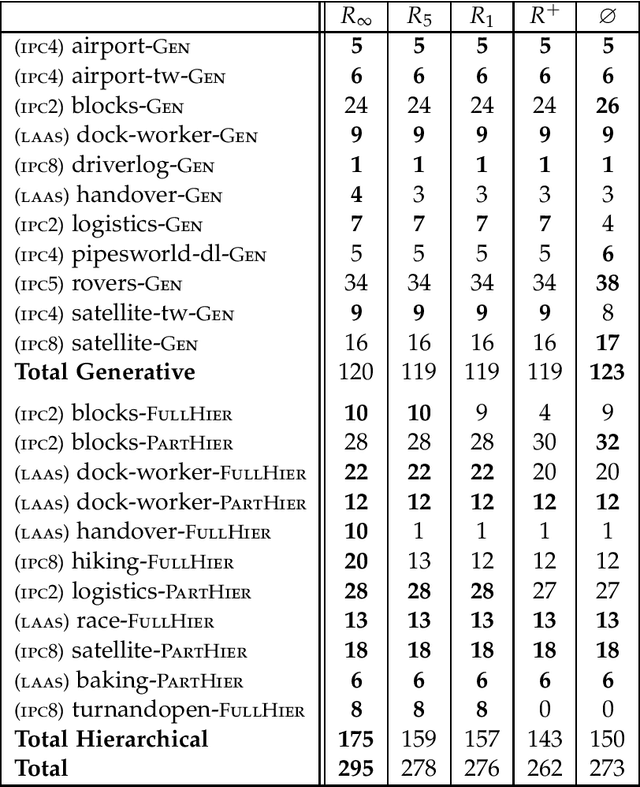
Temporal planning offers numerous advantages when based on an expressive representation. Timelines have been known to provide the required expressiveness but at the cost of search efficiency. We propose here a temporal planner, called FAPE, which supports many of the expressive temporal features of the ANML modeling language without loosing efficiency. FAPE's representation coherently integrates flexible timelines with hierarchical refinement methods that can provide efficient control knowledge. A novel reachability analysis technique is proposed and used to develop causal networks to constrain the search space. It is employed for the design of informed heuristics, inference methods and efficient search strategies. Experimental results on common benchmarks in the field permit to assess the components and search strategies of FAPE, and to compare it to IPC planners. The results show the proposed approach to be competitive with less expressive planners and often superior when hierarchical control knowledge is provided. FAPE, a freely available system, provides other features, not covered here, such as the integration of planning with acting, and the handling of sensing actions in partially observable environments.
GenoM3 Templates: from Middleware Independence to Formal Models Synthesis
Jul 26, 2018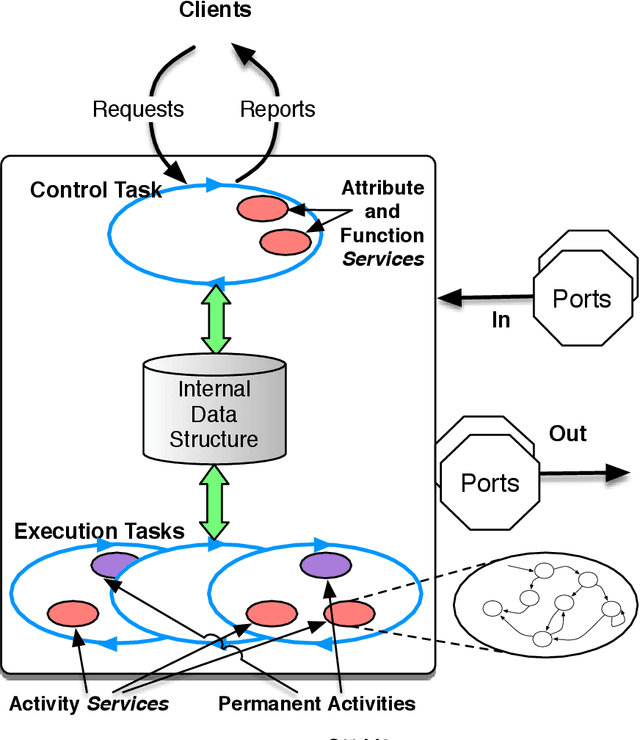

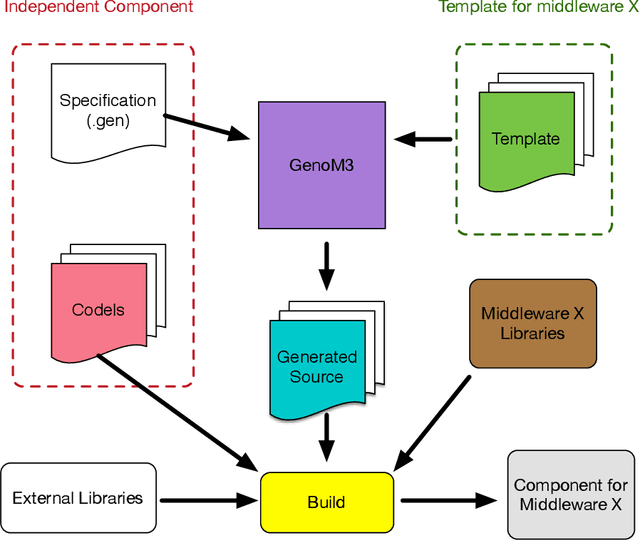
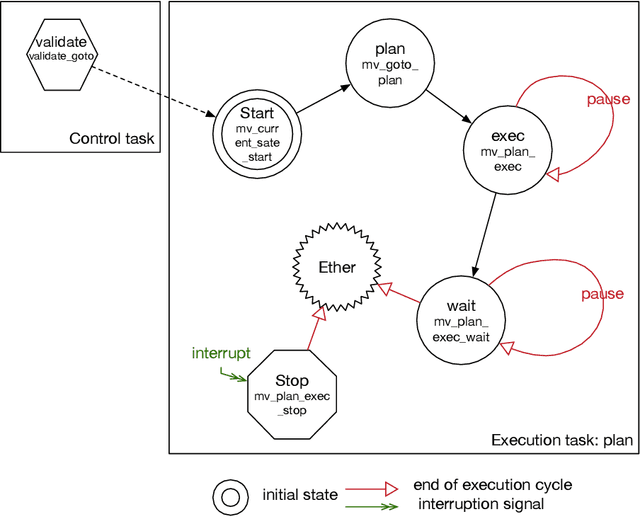
GenoM is an approach to develop robotic software components, which can be controlled, and assembled to build complex applications. Its latest version GenoM3, provides a template mechanism which is versatile enough to deploy components for different middleware without any change in the specification and user code. But this same template mechanism also enables us to automatically synthesize formal models (for two Validation and Verification frameworks) of the final components. We illustrate our approach on a real deployed example of a drone flight controller for which we prove offline real-time properties, and an outdoor robot for which we synthesize a controller to perform runtime verification.
A Verifiable and Correct-by-Construction Controller for Robot Functional Levels
Sep 02, 2013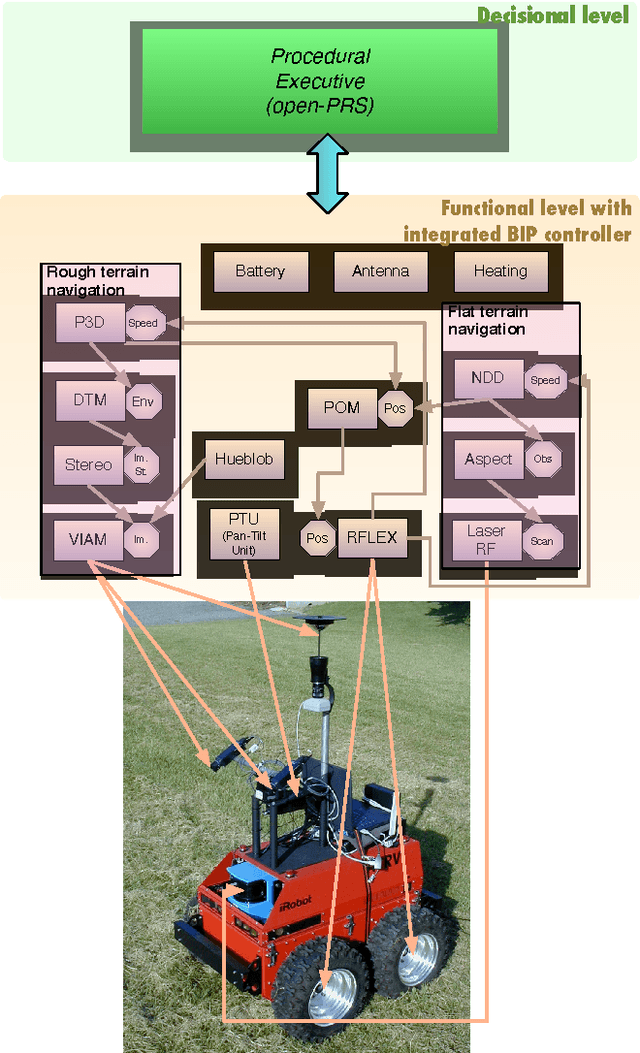
Autonomous robots are complex systems that require the interaction and cooperation between numerous heterogeneous software components. In recent times, robots are being increasingly used for complex and safety-critical tasks, such as exploring Mars and assisting/replacing humans. Consequently, robots are becoming critical systems that must meet safety properties, in particular, logical, temporal and real-time constraints. To this end, we present an evolution of the LAAS architecture for autonomous systems, in particular its GenoM tool. This evolution relies on the BIP component-based design framework, which has been successfully used in other domains such as embedded systems. We show how we integrate BIP into our existing methodology for developing the lowest (functional) level of robots. Particularly, we discuss the componentization of the functional level, the synthesis of an execution controller for it, and how we verify whether the resulting functional level conforms to properties such as deadlock-freedom. We also show through experimentation that the verification is feasible and usable for complex, real world robotic systems, and that the BIP-based functional levels resulting from our new methodology are, despite an overhead during execution, still practical on real world robotic platforms. Our approach has been fully implemented in the LAAS architecture, and the implementation has been used in several experiments on a real robot.