 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Infrastructure Inspection as Image Difference Classification: A Traffic Sign Case Study
Jun 04, 2026Digital twins (DTs) allow the digitalization of road infrastructure inspection, though this is hindered by limited annotated data. This work exploits the relational nature of continuous asset condition monitoring to reformulate image-based defect detection as image difference classification (IDC) to reduce data reliance. This was evaluated in a case study on low-resource traffic sign inspection with different IDC classifiers using a newly-curated, high quality dataset. Results indicate that the instruction-based classifier outperforms encoder-based ones and gains from comparison with reference images. This shows that IDC can be an effective task modeling for tackling data constraints in infrastructure inspection and DT asset condition updating.
HyperTensioN and Total-order Forward Decomposition optimizations
Jul 01, 2022


Hierarchical Task Networks (HTN) planners generate plans using a decomposition process with extra domain knowledge to guide search towards a planning task. While domain experts develop HTN descriptions, they may repeatedly describe the same preconditions, or methods that are rarely used or possible to be decomposed. By leveraging a three-stage compiler design we can easily support more language descriptions and preprocessing optimizations that when chained can greatly improve runtime efficiency in such domains. In this paper we evaluate such optimizations with the HyperTensioN HTN planner, used in the HTN IPC 2020.
Addendum to "HTN Acting: A Formalism and an Algorithm"
Jun 06, 2018
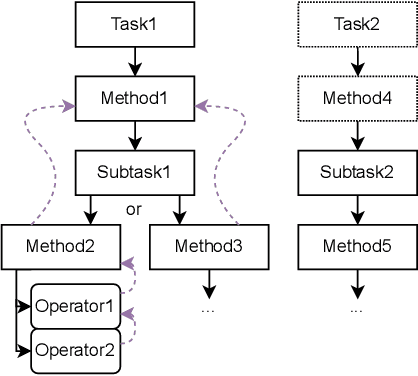
Hierarchical Task Network (HTN) planning is a practical and efficient approach to planning when the 'standard operating procedures' for a domain are available. Like Belief-Desire-Intention (BDI) agent reasoning, HTN planning performs hierarchical and context-based refinement of goals into subgoals and basic actions. However, while HTN planners 'lookahead' over the consequences of choosing one refinement over another, BDI agents interleave refinement with acting. There has been renewed interest in making HTN planners behave more like BDI agent systems, e.g. to have a unified representation for acting and planning. However, past work on the subject has remained informal or implementation-focused. This paper is a formal account of 'HTN acting', which supports interleaved deliberation, acting, and failure recovery. We use the syntax of the most general HTN planning formalism and build on its core semantics, and we provide an algorithm which combines our new formalism with the processing of exogenous events. We also study the properties of HTN acting and its relation to HTN planning.
Addendum to: Summary Information for Reasoning About Hierarchical Plans
Aug 09, 2017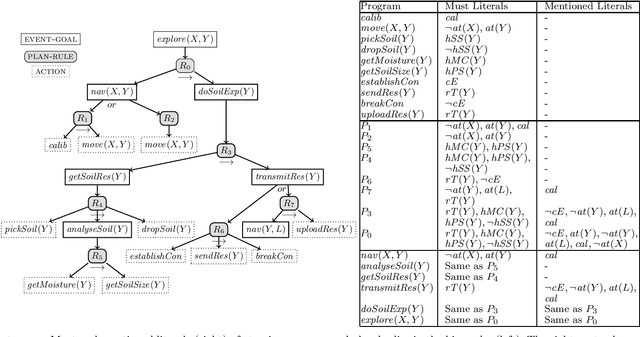
Hierarchically structured agent plans are important for efficient planning and acting, and they also serve (among other things) to produce "richer" classical plans, composed not just of a sequence of primitive actions, but also "abstract" ones representing the supplied hierarchies. A crucial step for this and other approaches is deriving precondition and effect "summaries" from a given plan hierarchy. This paper provides mechanisms to do this for more pragmatic and conventional hierarchies than in the past. To this end, we formally define the notion of a precondition and an effect for a hierarchical plan; we present data structures and algorithms for automatically deriving this information; and we analyse the properties of the presented algorithms. We conclude the paper by detailing how our algorithms may be used together with a classical planner in order to obtain abstract plans.
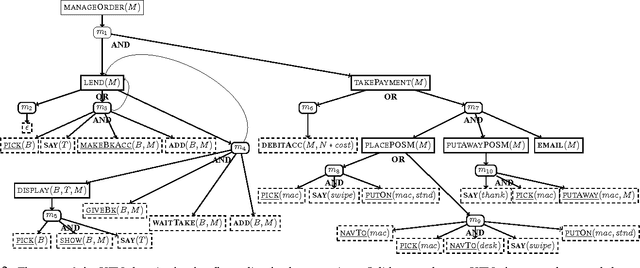
HATP: An HTN Planner for Robotics
Jun 12, 2014


Hierarchical Task Network (HTN) planning is a popular approach that cuts down on the classical planning search space by relying on a given hierarchical library of domain control knowledge. This provides an intuitive methodology for specifying high-level instructions on how robots and agents should perform tasks, while also giving the planner enough flexibility to choose the lower-level steps and their ordering. In this paper we present the HATP (Hierarchical Agent-based Task Planner) planning framework which extends the traditional HTN planning domain representation and semantics by making them more suitable for roboticists, and treating agents as "first class" entities in the language. The former is achieved by allowing "social rules" to be defined which specify what behaviour is acceptable/unacceptable by the agents/robots in the domain, and interleaving planning with geometric reasoning in order to validate online -with respect to a detailed geometric 3D world- the human/robot actions currently being pursued by HATP.
A Verifiable and Correct-by-Construction Controller for Robot Functional Levels
Sep 02, 2013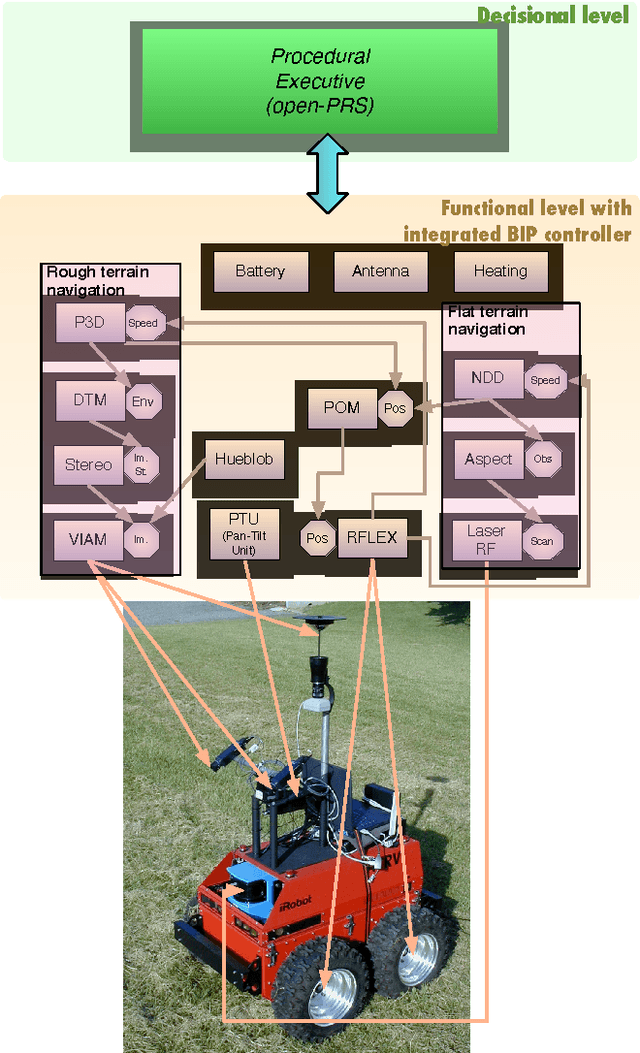
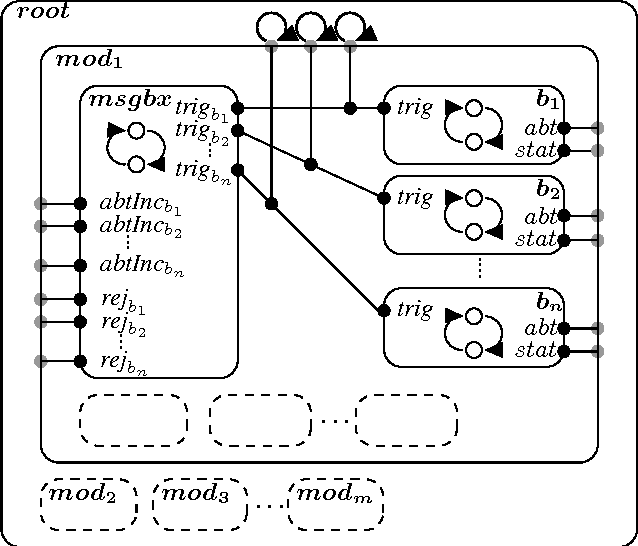
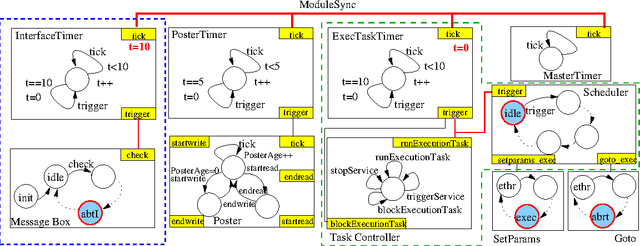
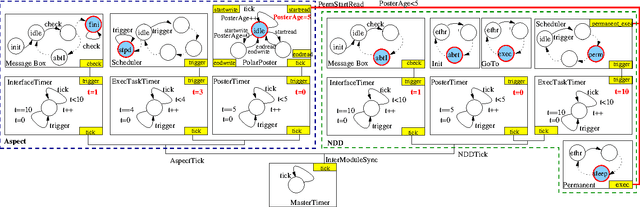
Autonomous robots are complex systems that require the interaction and cooperation between numerous heterogeneous software components. In recent times, robots are being increasingly used for complex and safety-critical tasks, such as exploring Mars and assisting/replacing humans. Consequently, robots are becoming critical systems that must meet safety properties, in particular, logical, temporal and real-time constraints. To this end, we present an evolution of the LAAS architecture for autonomous systems, in particular its GenoM tool. This evolution relies on the BIP component-based design framework, which has been successfully used in other domains such as embedded systems. We show how we integrate BIP into our existing methodology for developing the lowest (functional) level of robots. Particularly, we discuss the componentization of the functional level, the synthesis of an execution controller for it, and how we verify whether the resulting functional level conforms to properties such as deadlock-freedom. We also show through experimentation that the verification is feasible and usable for complex, real world robotic systems, and that the BIP-based functional levels resulting from our new methodology are, despite an overhead during execution, still practical on real world robotic platforms. Our approach has been fully implemented in the LAAS architecture, and the implementation has been used in several experiments on a real robot.
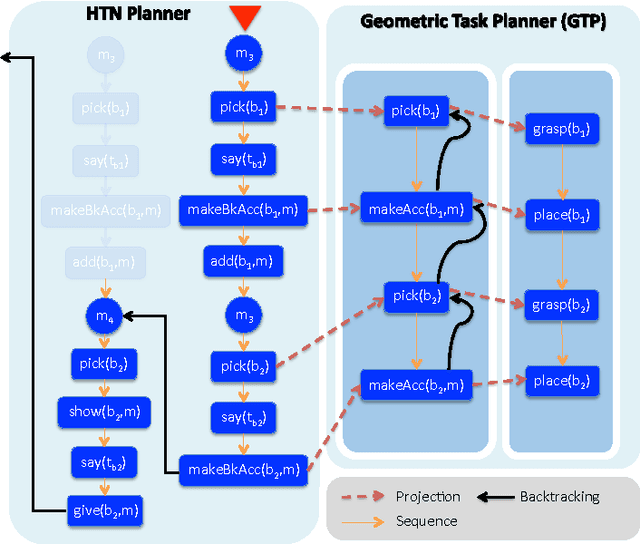
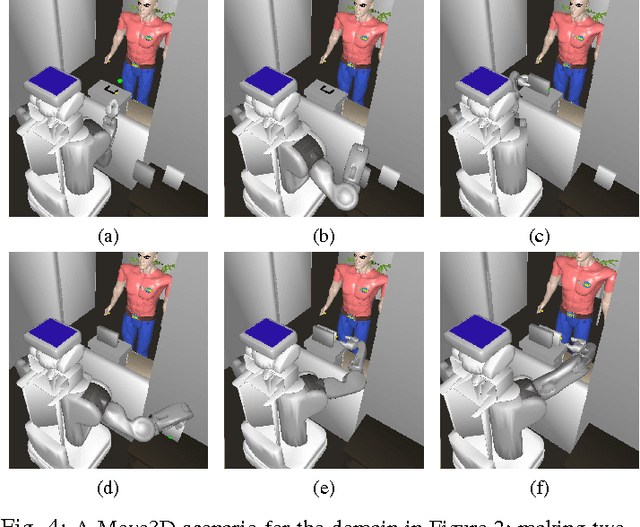
Towards Combining HTN Planning and Geometric Task Planning
Jul 04, 2013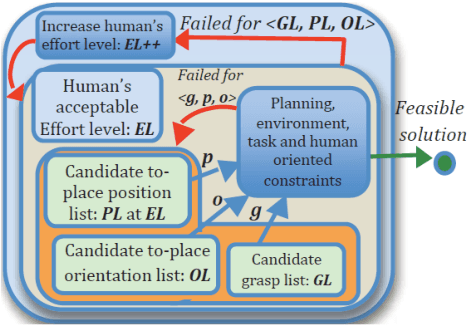
In this paper we present an interface between a symbolic planner and a geometric task planner, which is different to a standard trajectory planner in that the former is able to perform geometric reasoning on abstract entities---tasks. We believe that this approach facilitates a more principled interface to symbolic planning, while also leaving more room for the geometric planner to make independent decisions. We show how the two planners could be interfaced, and how their planning and backtracking could be interleaved. We also provide insights for a methodology for using the combined system, and experimental results to use as a benchmark with future extensions to both the combined system, as well as to the geometric task planner.