 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Socially Competent navigation through incorporating HRI
Apr 19, 2019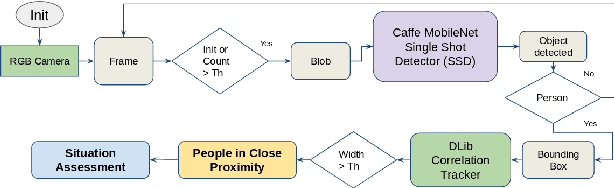
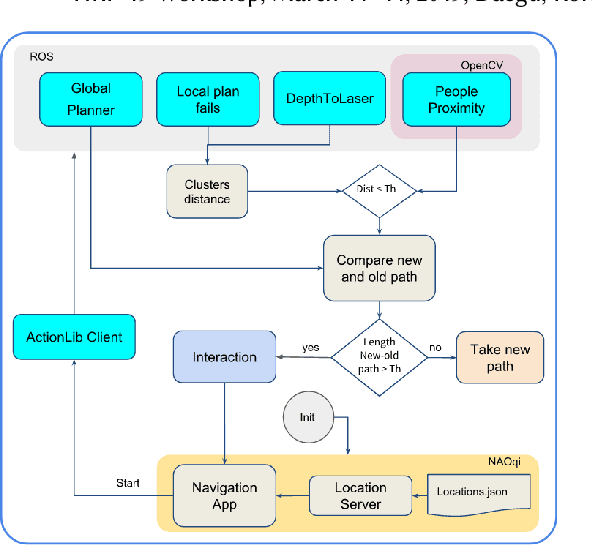
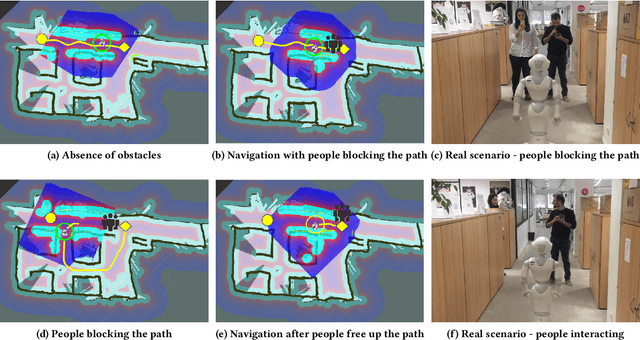
Over the last years, social robots have been deployed in public environments making evident the need of human-aware navigation capabilities. In this regard, the robotics community have made efforts to include proxemics or social conventions within the navigation approaches. Nevertheless, few works have tackled the problem of labelling humans as an interactive agent when blocking the robot motion trajectory. Current state of the art navigation planners will either propose an alternative path or freeze the motion until the path is free. We present the first prototype of a framework designed to enhance social competency of robots while navigating in indoor environments. The implementation is done using Navigation and Object Detection open-source software. Specifically, the Robot Operating System (ROS) navigation stack, and OpenCV with Caffe deep learning models and MobileNet Single Shot Detector (SSD), respectively.
Wait for me! Towards socially assistive walk companions
Apr 18, 2019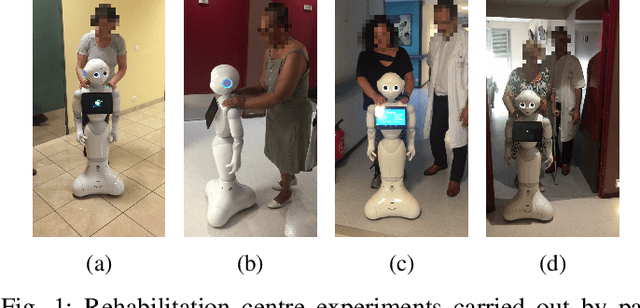
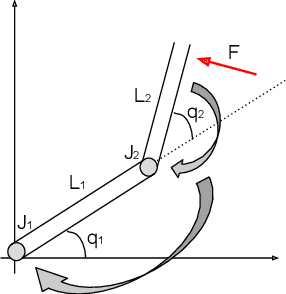
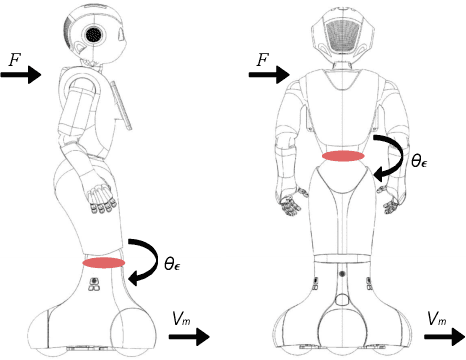
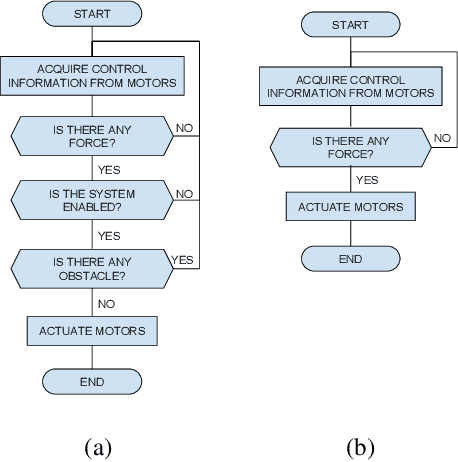
The aim of the present study involves designing a humanoid robot guide as a walking trainer for elderly and rehabilitation patients. The system is based on the humanoid robot Pepper with a compliance approach that allows to match the motion intention of the user to the robot's pace. This feasibility study is backed up by an experimental evaluation conducted in a rehabilitation centre. We hypothesize that Pepper robot used as an assistive partner, can also benefit elderly users by motivating them to perform physical activity.
Towards Dialogue-based Navigation with Multivariate Adaptation driven by Intention and Politeness for Social Robots
Nov 14, 2018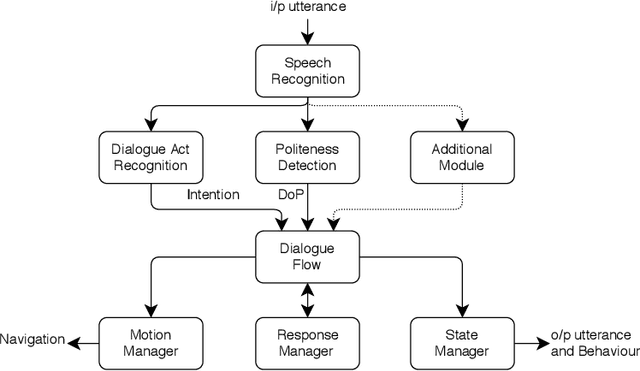
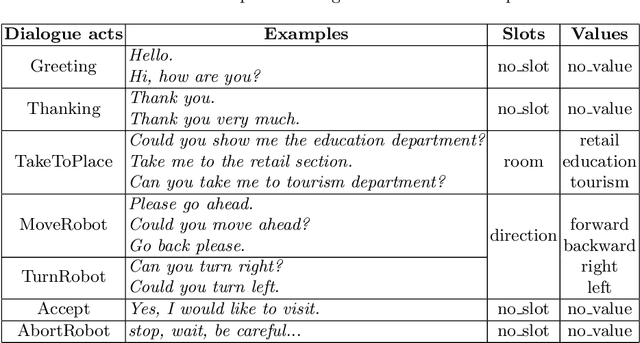
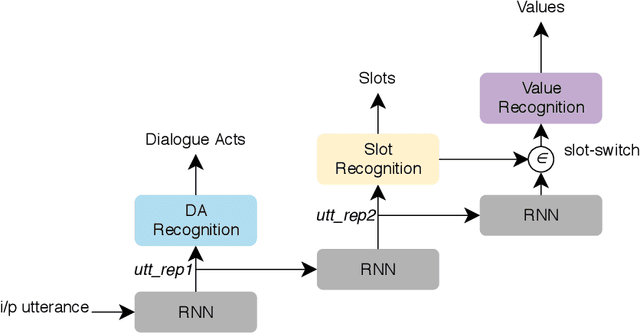
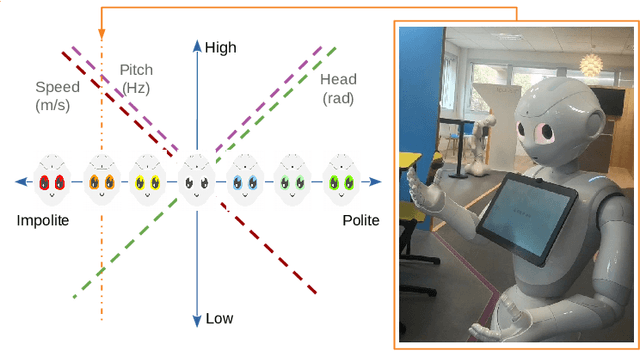
Service robots need to show appropriate social behaviour in order to be deployed in social environments such as healthcare, education, retail, etc. Some of the main capabilities that robots should have are navigation and conversational skills. If the person is impatient, the person might want a robot to navigate faster and vice versa. Linguistic features that indicate politeness can provide social cues about a person's patient and impatient behaviour. The novelty presented in this paper is to dynamically incorporate politeness in robotic dialogue systems for navigation. Understanding the politeness in users' speech can be used to modulate the robot behaviour and responses. Therefore, we developed a dialogue system to navigate in an indoor environment, which produces different robot behaviours and responses based on users' intention and degree of politeness. We deploy and test our system with the Pepper robot that adapts to the changes in user's politeness.
Paving the Way for Culturally Competent Robots: a Position Paper
Mar 22, 2018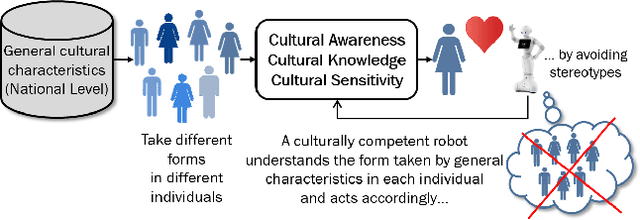
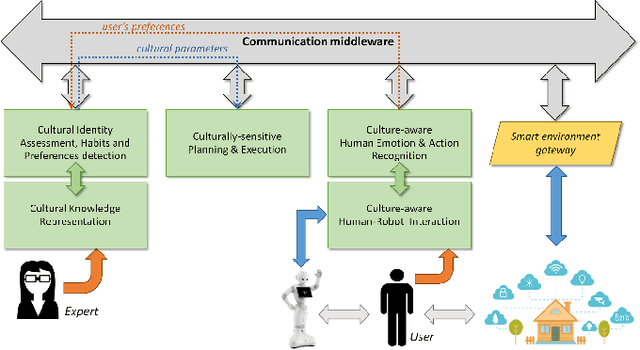
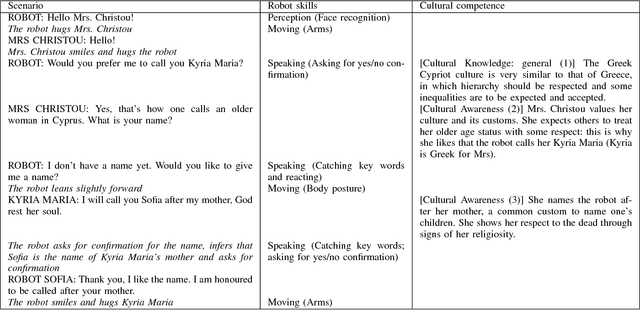
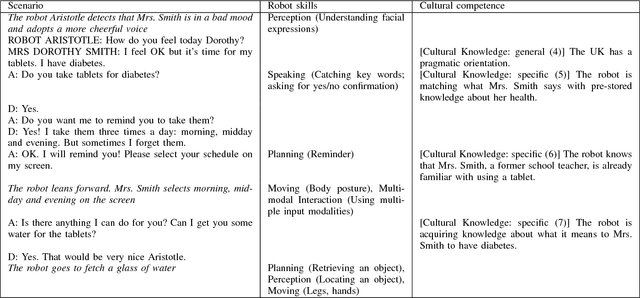
Cultural competence is a well known requirement for an effective healthcare, widely investigated in the nursing literature. We claim that personal assistive robots should likewise be culturally competent, aware of general cultural characteristics and of the different forms they take in different individuals, and sensitive to cultural differences while perceiving, reasoning, and acting. Drawing inspiration from existing guidelines for culturally competent healthcare and the state-of-the-art in culturally competent robotics, we identify the key robot capabilities which enable culturally competent behaviours and discuss methodologies for their development and evaluation.
* Presented at: 26th IEEE International Symposium onRobot and Human Interactive Communication (RO-MAN), 2017, Lisbon, Portugal. arXiv admin note: substantial text overlap with arXiv:1708.06276
The CARESSES EU-Japan project: making assistive robots culturally competent
Aug 21, 2017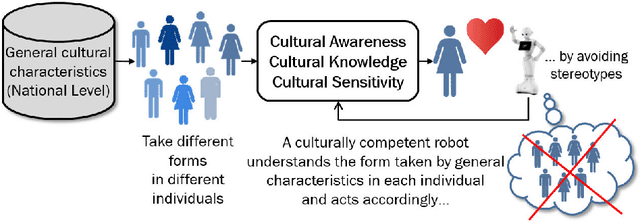
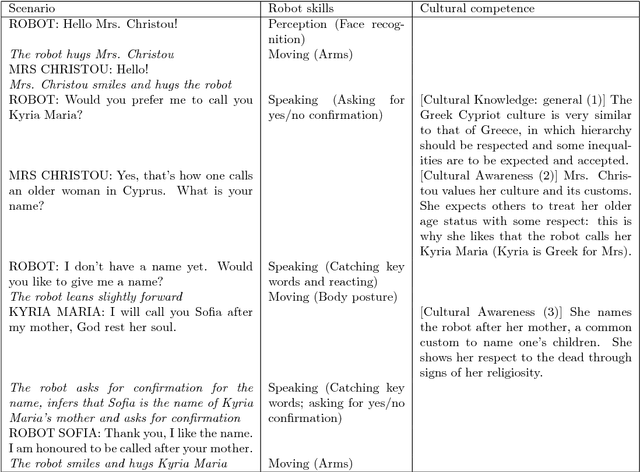
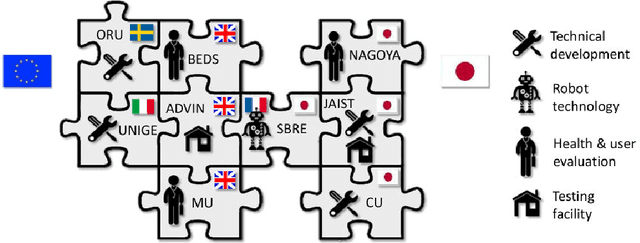
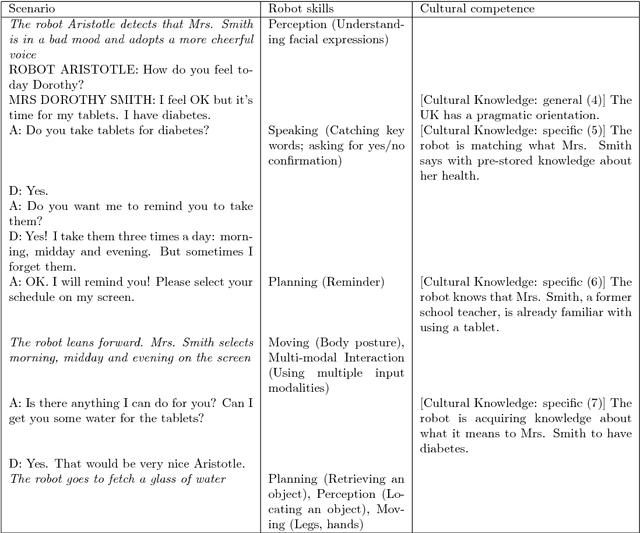
The nursing literature shows that cultural competence is an important requirement for effective healthcare. We claim that personal assistive robots should likewise be culturally competent, that is, they should be aware of general cultural characteristics and of the different forms they take in different individuals, and take these into account while perceiving, reasoning, and acting. The CARESSES project is an Europe-Japan collaborative effort that aims at designing, developing and evaluating culturally competent assistive robots. These robots will be able to adapt the way they behave, speak and interact to the cultural identity of the person they assist. This paper describes the approach taken in the CARESSES project, its initial steps, and its future plans.
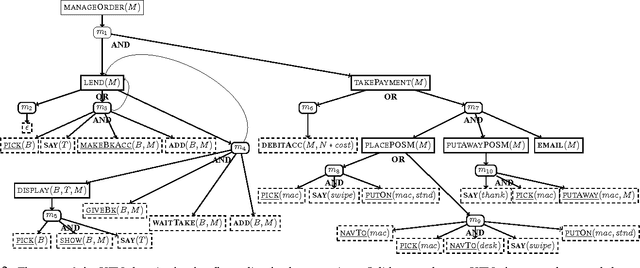
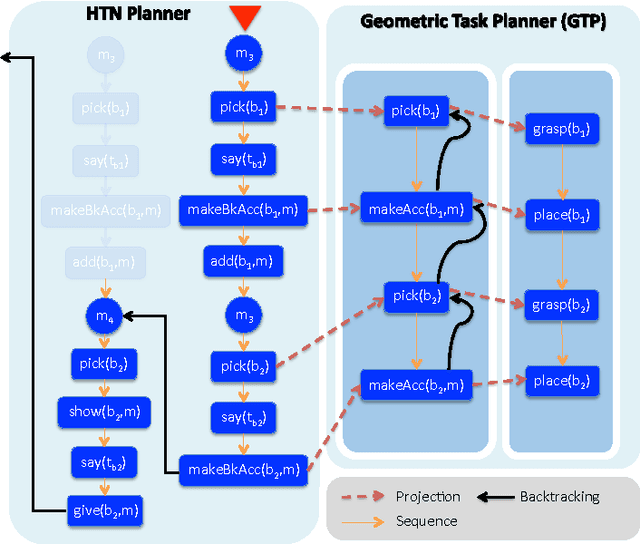
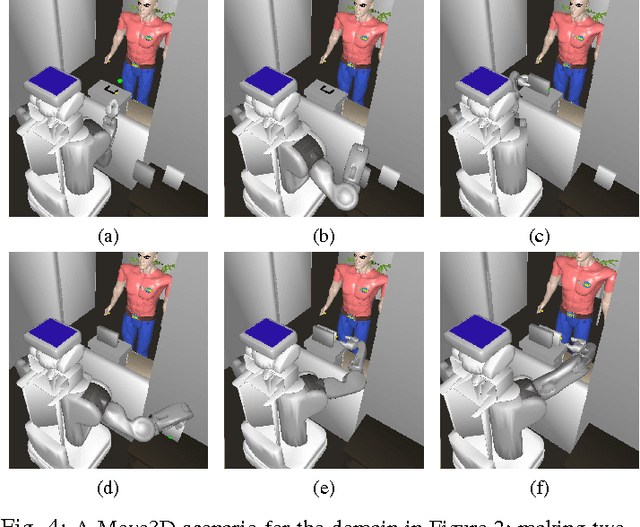
Towards Combining HTN Planning and Geometric Task Planning
Jul 04, 2013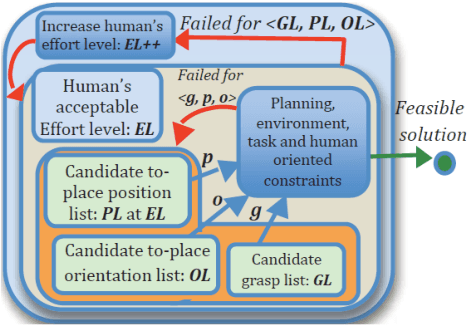
In this paper we present an interface between a symbolic planner and a geometric task planner, which is different to a standard trajectory planner in that the former is able to perform geometric reasoning on abstract entities---tasks. We believe that this approach facilitates a more principled interface to symbolic planning, while also leaving more room for the geometric planner to make independent decisions. We show how the two planners could be interfaced, and how their planning and backtracking could be interleaved. We also provide insights for a methodology for using the combined system, and experimental results to use as a benchmark with future extensions to both the combined system, as well as to the geometric task planner.