 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePublic Acceptance of Cybernetic Avatars in the service sector: Evidence from a Large-Scale Survey in Dubai
Jun 17, 2025Cybernetic avatars are hybrid interaction robots or digital representations that combine autonomous capabilities with teleoperated control. This study investigates the acceptance of cybernetic avatars in the highly multicultural society of Dubai, with particular emphasis on robotic avatars for customer service. Specifically, we explore how acceptance varies as a function of robot appearance (e.g., android, robotic-looking, cartoonish), deployment settings (e.g., shopping malls, hotels, hospitals), and functional tasks (e.g., providing information, patrolling). To this end, we conducted a large-scale survey with over 1,000 participants. Overall, cybernetic avatars received a high level of acceptance, with physical robot avatars receiving higher acceptance than digital avatars. In terms of appearance, robot avatars with a highly anthropomorphic robotic appearance were the most accepted, followed by cartoonish designs and androids. Animal-like appearances received the lowest level of acceptance. Among the tasks, providing information and guidance was rated as the most valued. Shopping malls, airports, public transport stations, and museums were the settings with the highest acceptance, whereas healthcare-related spaces received lower levels of support. An analysis by community cluster revealed among others that Emirati respondents showed significantly greater acceptance of android appearances compared to the overall sample, while participants from the 'Other Asia' cluster were significantly more accepting of cartoonish appearances. Our study underscores the importance of incorporating citizen feedback into the design and deployment of cybernetic avatars from the early stages to enhance acceptance of this technology in society.
Hypothesis on the Functional Advantages of the Selection-Broadcast Cycle Structure: Global Workspace Theory and Dealing with a Real-Time World
May 20, 2025This paper discusses the functional advantages of the Selection-Broadcast Cycle structure proposed by Global Workspace Theory (GWT), inspired by human consciousness, particularly focusing on its applicability to artificial intelligence and robotics in dynamic, real-time scenarios. While previous studies often examined the Selection and Broadcast processes independently, this research emphasizes their combined cyclic structure and the resulting benefits for real-time cognitive systems. Specifically, the paper identifies three primary benefits: Dynamic Thinking Adaptation, Experience-Based Adaptation, and Immediate Real-Time Adaptation. This work highlights GWT's potential as a cognitive architecture suitable for sophisticated decision-making and adaptive performance in unsupervised, dynamic environments. It suggests new directions for the development and implementation of robust, general-purpose AI and robotics systems capable of managing complex, real-world tasks.
Dance Teaching by a Robot: Combining Cognitive and Physical Human-Robot Interaction for Supporting the Skill Learning Process
Oct 29, 2018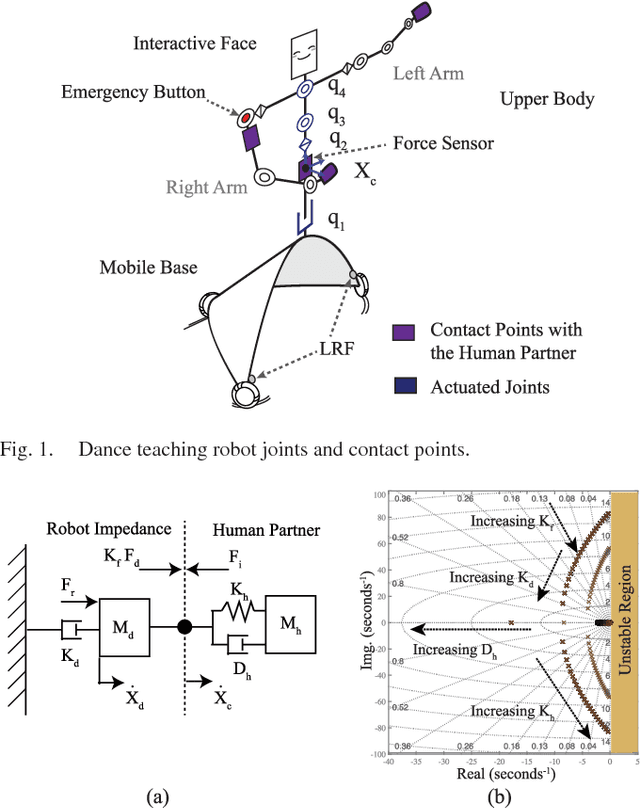
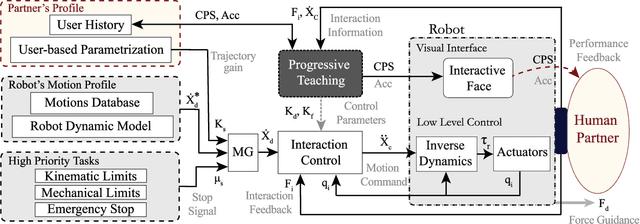
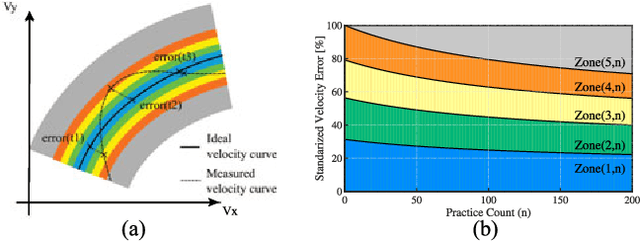
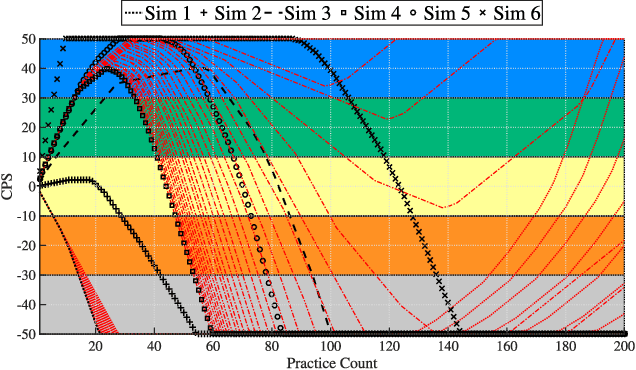
This letter presents a physical human-robot interaction scenario in which a robot guides and performs the role of a teacher within a defined dance training framework. A combined cognitive and physical feedback of performance is proposed for assisting the skill learning process. Direct contact cooperation has been designed through an adaptive impedance-based controller that adjusts according to the partner's performance in the task. In measuring performance, a scoring system has been designed using the concept of progressive teaching (PT). The system adjusts the difficulty based on the user's number of practices and performance history. Using the proposed method and a baseline constant controller, comparative experiments have shown that the PT presents better performance in the initial stage of skill learning. An analysis of the subjects' perception of comfort, peace of mind, and robot performance have shown a significant difference at the p < .01 level, favoring the PT algorithm.
* Presented at IEEE International Conference on Robotics and Automation ICRA-2017
Paving the Way for Culturally Competent Robots: a Position Paper
Mar 22, 2018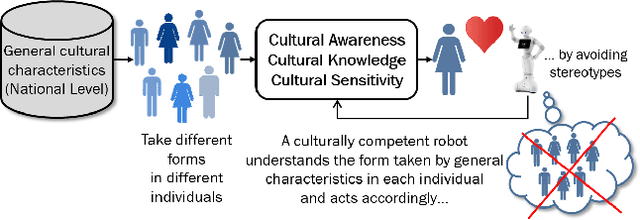
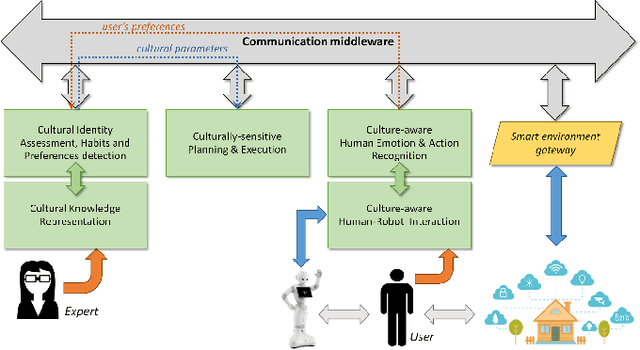
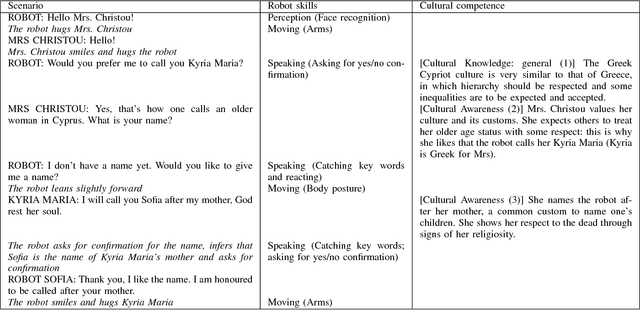
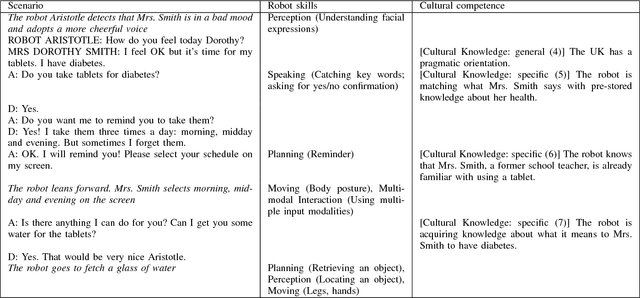
Cultural competence is a well known requirement for an effective healthcare, widely investigated in the nursing literature. We claim that personal assistive robots should likewise be culturally competent, aware of general cultural characteristics and of the different forms they take in different individuals, and sensitive to cultural differences while perceiving, reasoning, and acting. Drawing inspiration from existing guidelines for culturally competent healthcare and the state-of-the-art in culturally competent robotics, we identify the key robot capabilities which enable culturally competent behaviours and discuss methodologies for their development and evaluation.
* Presented at: 26th IEEE International Symposium onRobot and Human Interactive Communication (RO-MAN), 2017, Lisbon, Portugal. arXiv admin note: substantial text overlap with arXiv:1708.06276
The CARESSES EU-Japan project: making assistive robots culturally competent
Aug 21, 2017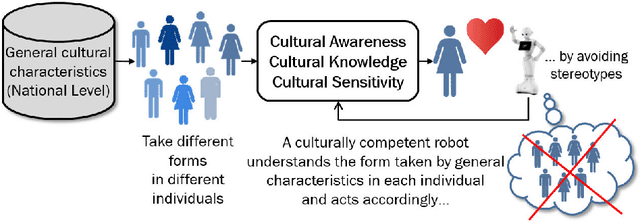
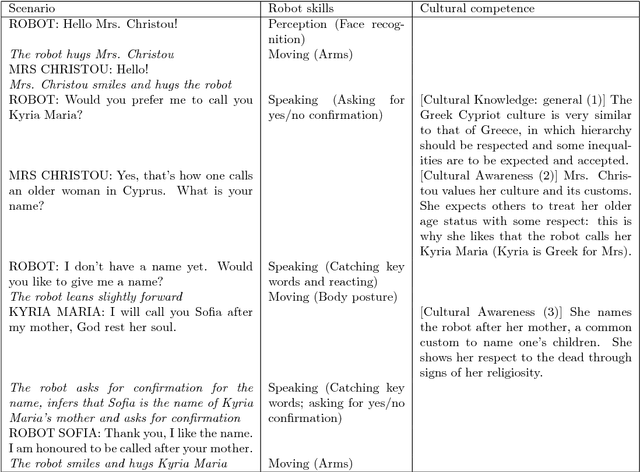
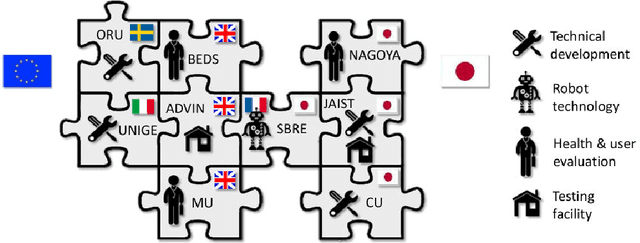
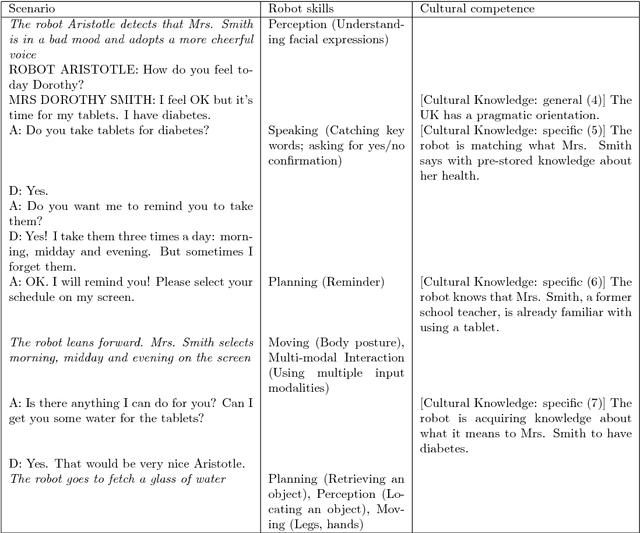
The nursing literature shows that cultural competence is an important requirement for effective healthcare. We claim that personal assistive robots should likewise be culturally competent, that is, they should be aware of general cultural characteristics and of the different forms they take in different individuals, and take these into account while perceiving, reasoning, and acting. The CARESSES project is an Europe-Japan collaborative effort that aims at designing, developing and evaluating culturally competent assistive robots. These robots will be able to adapt the way they behave, speak and interact to the cultural identity of the person they assist. This paper describes the approach taken in the CARESSES project, its initial steps, and its future plans.