 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Machine Learning for Robot Perception of Affect and Engagement in Autism Therapy
Jun 19, 2018Robots have great potential to facilitate future therapies for children on the autism spectrum. However, existing robots lack the ability to automatically perceive and respond to human affect, which is necessary for establishing and maintaining engaging interactions. Moreover, their inference challenge is made harder by the fact that many individuals with autism have atypical and unusually diverse styles of expressing their affective-cognitive states. To tackle the heterogeneity in behavioral cues of children with autism, we use the latest advances in deep learning to formulate a personalized machine learning (ML) framework for automatic perception of the childrens affective states and engagement during robot-assisted autism therapy. The key to our approach is a novel shift from the traditional ML paradigm - instead of using 'one-size-fits-all' ML models, our personalized ML framework is optimized for each child by leveraging relevant contextual information (demographics and behavioral assessment scores) and individual characteristics of each child. We designed and evaluated this framework using a dataset of multi-modal audio, video and autonomic physiology data of 35 children with autism (age 3-13) and from 2 cultures (Asia and Europe), participating in a 25-minute child-robot interaction (~500k datapoints). Our experiments confirm the feasibility of the robot perception of affect and engagement, showing clear improvements due to the model personalization. The proposed approach has potential to improve existing therapies for autism by offering more efficient monitoring and summarization of the therapy progress.
Paving the Way for Culturally Competent Robots: a Position Paper
Mar 22, 2018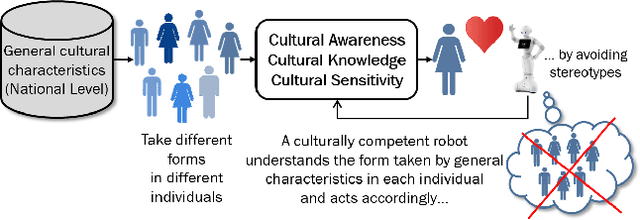
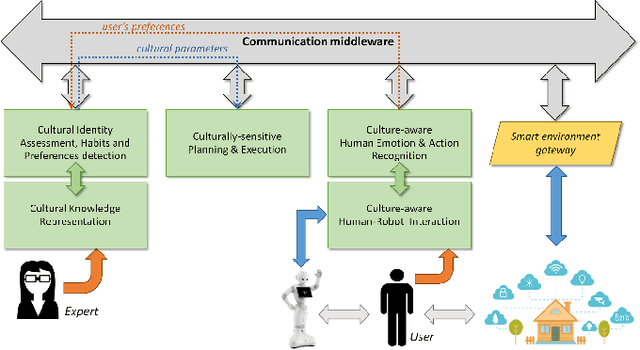
Cultural competence is a well known requirement for an effective healthcare, widely investigated in the nursing literature. We claim that personal assistive robots should likewise be culturally competent, aware of general cultural characteristics and of the different forms they take in different individuals, and sensitive to cultural differences while perceiving, reasoning, and acting. Drawing inspiration from existing guidelines for culturally competent healthcare and the state-of-the-art in culturally competent robotics, we identify the key robot capabilities which enable culturally competent behaviours and discuss methodologies for their development and evaluation.
* Presented at: 26th IEEE International Symposium onRobot and Human Interactive Communication (RO-MAN), 2017, Lisbon, Portugal. arXiv admin note: substantial text overlap with arXiv:1708.06276
The CARESSES EU-Japan project: making assistive robots culturally competent
Aug 21, 2017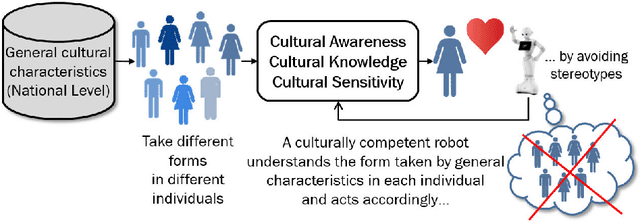
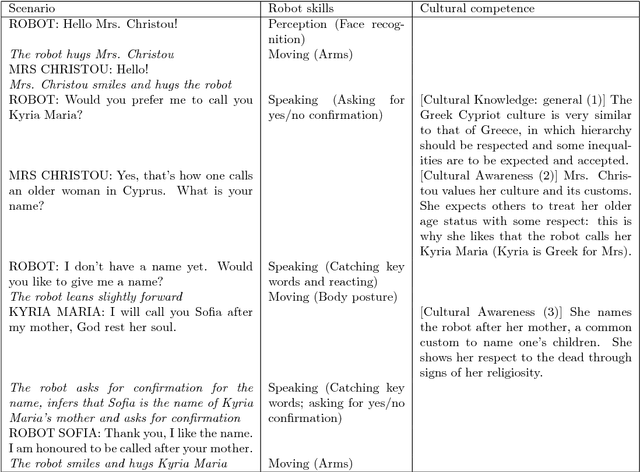
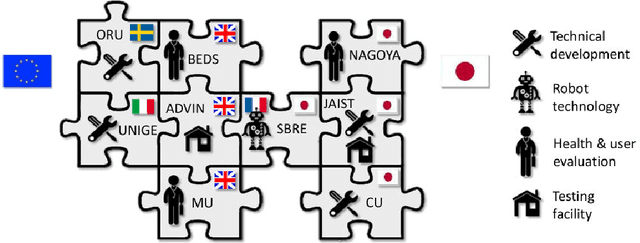
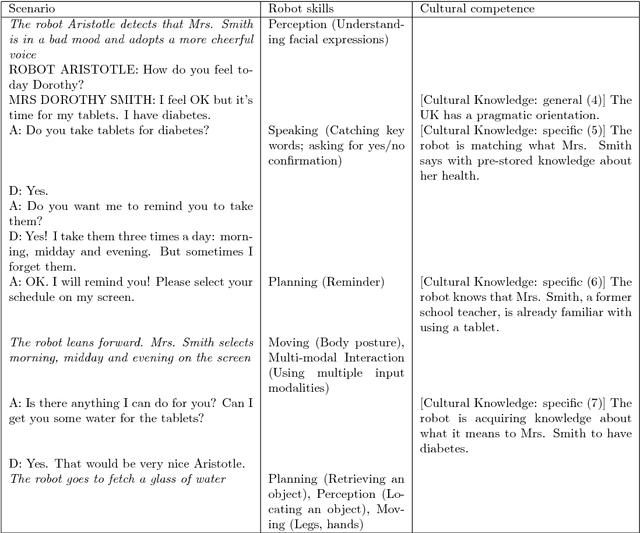
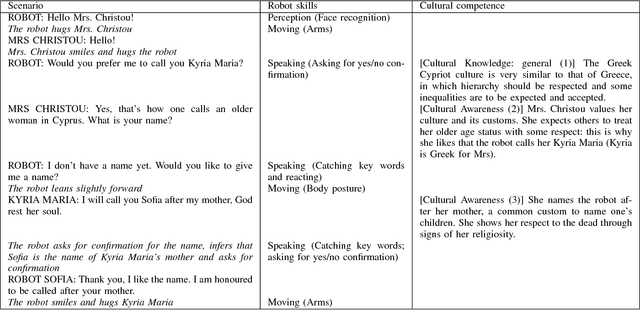
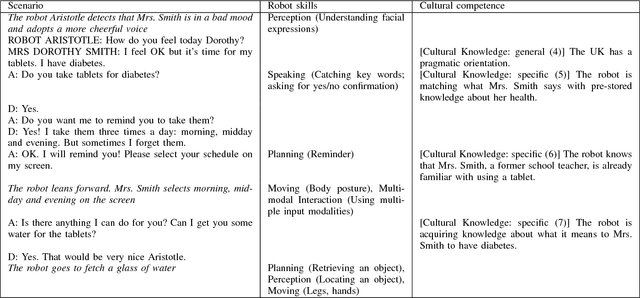
The nursing literature shows that cultural competence is an important requirement for effective healthcare. We claim that personal assistive robots should likewise be culturally competent, that is, they should be aware of general cultural characteristics and of the different forms they take in different individuals, and take these into account while perceiving, reasoning, and acting. The CARESSES project is an Europe-Japan collaborative effort that aims at designing, developing and evaluating culturally competent assistive robots. These robots will be able to adapt the way they behave, speak and interact to the cultural identity of the person they assist. This paper describes the approach taken in the CARESSES project, its initial steps, and its future plans.