 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Test-time Inference for Generative Planning Models
May 30, 2026Generative models have emerged as a powerful paradigm for AI planning, yet their performance remains constrained by the training data distribution. One approach is to improve generated solutions during inference by scaling test-time compute. A more efficient alternative is to optimize the inference process itself. In this paper, we show that a modified version of a classical Open-Closed List (OCL) search provides just such an efficient inference procedure. Our algorithm synergizes two learned components: a generative model that performs fast rollouts from intermediate states and a heuristic model that prioritizes among candidate reasoning paths. Key contributions include novel exploration control mechanisms and integration of learned models within the OCL framework. Across multiple combinatorial planning domains, our approach outperforms both neurosymbolic search baselines and classical solvers in computational efficiency and solution quality.
Self-Improvement for Fast, High-Quality Plan Generation
May 05, 2026Generative models trained on synthetic plan data are a promising approach to generalized planning. Recent work has focused on finding any valid plan, rather than a high-quality solution. We address the challenge of producing high-quality plans, a computationally hard problem, in sub-exponential time. First, we demonstrate that, given optimal data, a decoder-only transformer can generate high-quality plans for unseen problem instances. Second, we show how to self-improve an initial model trained on sub-optimal data. Each round of self-improvement combines multiple model calls with graph search to generate improved plans, used for model fine-tuning. An experimental study on four domains: Blocksworld, Logistics, Labyrinth, and Sokoban, shows on average a 30% reduction in plan length over the source symbolic planner, with over 80% of plans being optimal, where the optimum is known. Plan quality is further improved by inference-time search. The model's latency scales sub-exponentially in contrast to the satisficing and optimal symbolic planners to which we compare. Together, these results suggest that self-improvement with generative models offers a scalable approach for high-quality plan generation.
Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path Finding
Feb 12, 2026MAPF is a core coordination problem for large robot fleets in automated warehouses and logistics. Existing approaches are typically either open-loop planners, which generate fixed trajectories and struggle to handle disturbances, or closed-loop heuristics without reliable performance guarantees, limiting their use in safety-critical deployments. This paper presents ACCBS, a closed-loop algorithm built on a finite-horizon variant of CBS with a horizon-changing mechanism inspired by iterative deepening in MPC. ACCBS dynamically adjusts the planning horizon based on the available computational budget, and reuses a single constraint tree to enable seamless transitions between horizons. As a result, it produces high-quality feasible solutions quickly while being asymptotically optimal as the budget increases, exhibiting anytime behavior. Extensive case studies demonstrate that ACCBS combines flexibility to disturbances with strong performance guarantees, effectively bridging the gap between theoretical optimality and practical robustness for large-scale robot deployment.
Collaborative Multi-Robot Non-Prehensile Manipulation via Flow-Matching Co-Generation
Nov 14, 2025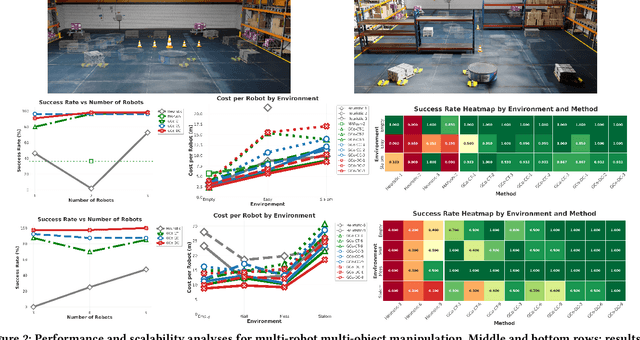
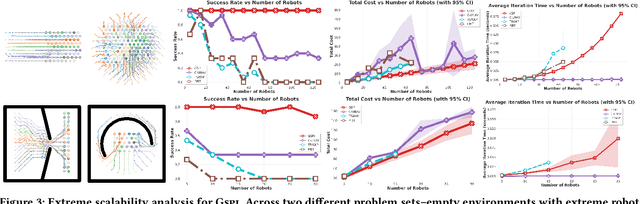
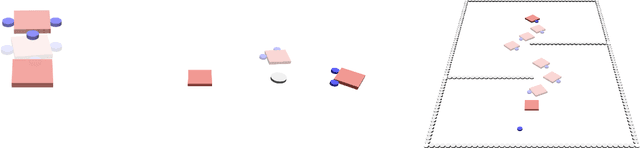

Coordinating a team of robots to reposition multiple objects in cluttered environments requires reasoning jointly about where robots should establish contact, how to manipulate objects once contact is made, and how to navigate safely and efficiently at scale. Prior approaches typically fall into two extremes -- either learning the entire task or relying on privileged information and hand-designed planners -- both of which struggle to handle diverse objects in long-horizon tasks. To address these challenges, we present a unified framework for collaborative multi-robot, multi-object non-prehensile manipulation that integrates flow-matching co-generation with anonymous multi-robot motion planning. Within this framework, a generative model co-generates contact formations and manipulation trajectories from visual observations, while a novel motion planner conveys robots at scale. Crucially, the same planner also supports coordination at the object level, assigning manipulated objects to larger target structures and thereby unifying robot- and object-level reasoning within a single algorithmic framework. Experiments in challenging simulated environments demonstrate that our approach outperforms baselines in both motion planning and manipulation tasks, highlighting the benefits of generative co-design and integrated planning for scaling collaborative manipulation to complex multi-agent, multi-object settings. Visit gco-paper.github.io for code and demonstrations.
Multi-robot Path Planning and Scheduling via Model Predictive Optimal Transport (MPC-OT)
Aug 28, 2025In this paper, we propose a novel methodology for path planning and scheduling for multi-robot navigation that is based on optimal transport theory and model predictive control. We consider a setup where $N$ robots are tasked to navigate to $M$ targets in a common space with obstacles. Mapping robots to targets first and then planning paths can result in overlapping paths that lead to deadlocks. We derive a strategy based on optimal transport that not only provides minimum cost paths from robots to targets but also guarantees non-overlapping trajectories. We achieve this by discretizing the space of interest into $K$ cells and by imposing a ${K\times K}$ cost structure that describes the cost of transitioning from one cell to another. Optimal transport then provides \textit{optimal and non-overlapping} cell transitions for the robots to reach the targets that can be readily deployed without any scheduling considerations. The proposed solution requires $\unicode{x1D4AA}(K^3\log K)$ computations in the worst-case and $\unicode{x1D4AA}(K^2\log K)$ for well-behaved problems. To further accommodate potentially overlapping trajectories (unavoidable in certain situations) as well as robot dynamics, we show that a temporal structure can be integrated into optimal transport with the help of \textit{replans} and \textit{model predictive control}.
DeepFleet: Multi-Agent Foundation Models for Mobile Robots
Aug 12, 2025
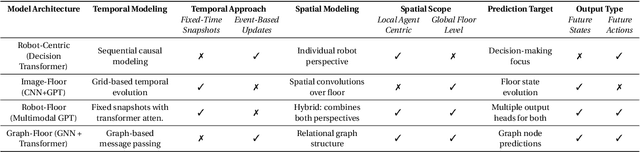
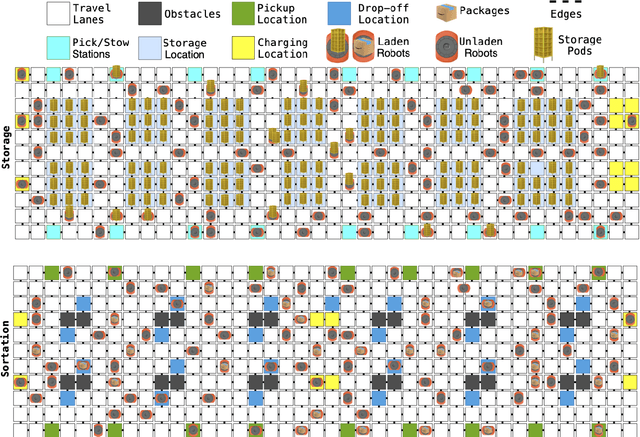
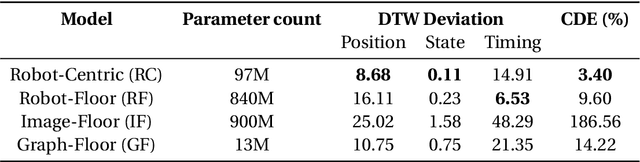
We introduce DeepFleet, a suite of foundation models designed to support coordination and planning for large-scale mobile robot fleets. These models are trained on fleet movement data, including robot positions, goals, and interactions, from hundreds of thousands of robots in Amazon warehouses worldwide. DeepFleet consists of four architectures that each embody a distinct inductive bias and collectively explore key points in the design space for multi-agent foundation models: the robot-centric (RC) model is an autoregressive decision transformer operating on neighborhoods of individual robots; the robot-floor (RF) model uses a transformer with cross-attention between robots and the warehouse floor; the image-floor (IF) model applies convolutional encoding to a multi-channel image representation of the full fleet; and the graph-floor (GF) model combines temporal attention with graph neural networks for spatial relationships. In this paper, we describe these models and present our evaluation of the impact of these design choices on prediction task performance. We find that the robot-centric and graph-floor models, which both use asynchronous robot state updates and incorporate the localized structure of robot interactions, show the most promise. We also present experiments that show that these two models can make effective use of larger warehouses operation datasets as the models are scaled up.
Reliable and Efficient Multi-Agent Coordination via Graph Neural Network Variational Autoencoders
Mar 04, 2025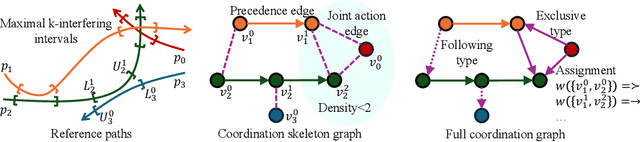
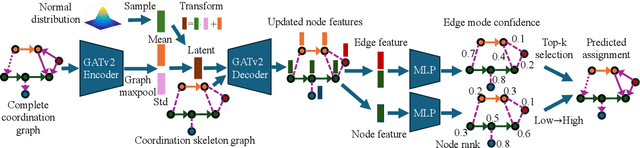
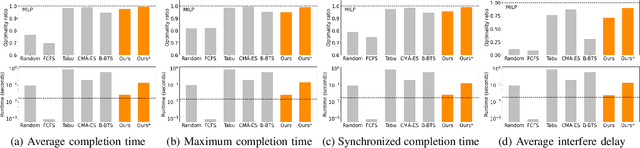
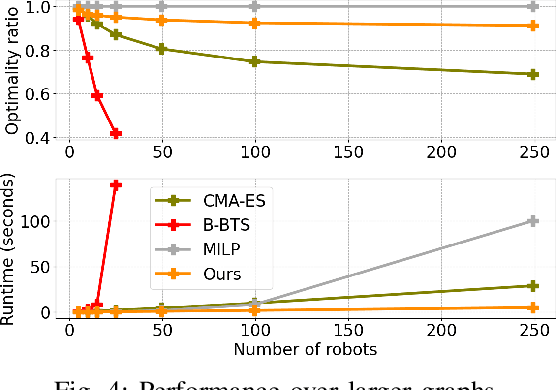
Multi-agent coordination is crucial for reliable multi-robot navigation in shared spaces such as automated warehouses. In regions of dense robot traffic, local coordination methods may fail to find a deadlock-free solution. In these scenarios, it is appropriate to let a central unit generate a global schedule that decides the passing order of robots. However, the runtime of such centralized coordination methods increases significantly with the problem scale. In this paper, we propose to leverage Graph Neural Network Variational Autoencoders (GNN-VAE) to solve the multi-agent coordination problem at scale faster than through centralized optimization. We formulate the coordination problem as a graph problem and collect ground truth data using a Mixed-Integer Linear Program (MILP) solver. During training, our learning framework encodes good quality solutions of the graph problem into a latent space. At inference time, solution samples are decoded from the sampled latent variables, and the lowest-cost sample is selected for coordination. Finally, the feasible proposal with the highest performance index is selected for the deployment. By construction, our GNN-VAE framework returns solutions that always respect the constraints of the considered coordination problem. Numerical results show that our approach trained on small-scale problems can achieve high-quality solutions even for large-scale problems with 250 robots, being much faster than other baselines. Project page: https://mengyuest.github.io/gnn-vae-coord
Scalable Multi-Robot Task Allocation and Coordination under Signal Temporal Logic Specifications
Mar 04, 2025Motion planning with simple objectives, such as collision-avoidance and goal-reaching, can be solved efficiently using modern planners. However, the complexity of the allowed tasks for these planners is limited. On the other hand, signal temporal logic (STL) can specify complex requirements, but STL-based motion planning and control algorithms often face scalability issues, especially in large multi-robot systems with complex dynamics. In this paper, we propose an algorithm that leverages the best of the two worlds. We first use a single-robot motion planner to efficiently generate a set of alternative reference paths for each robot. Then coordination requirements are specified using STL, which is defined over the assignment of paths and robots' progress along those paths. We use a Mixed Integer Linear Program (MILP) to compute task assignments and robot progress targets over time such that the STL specification is satisfied. Finally, a local controller is used to track the target progress. Simulations demonstrate that our method can handle tasks with complex constraints and scales to large multi-robot teams and intricate task allocation scenarios.
Robby is Not a Robber : On the Use of Institutions for Learning Normative Behavior
Aug 01, 2019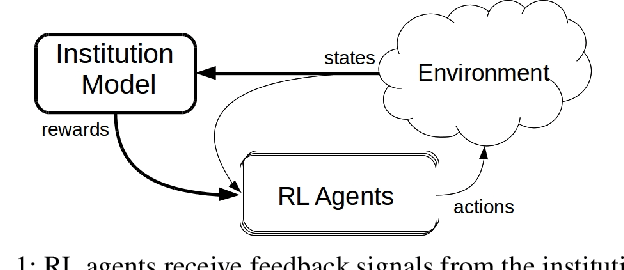
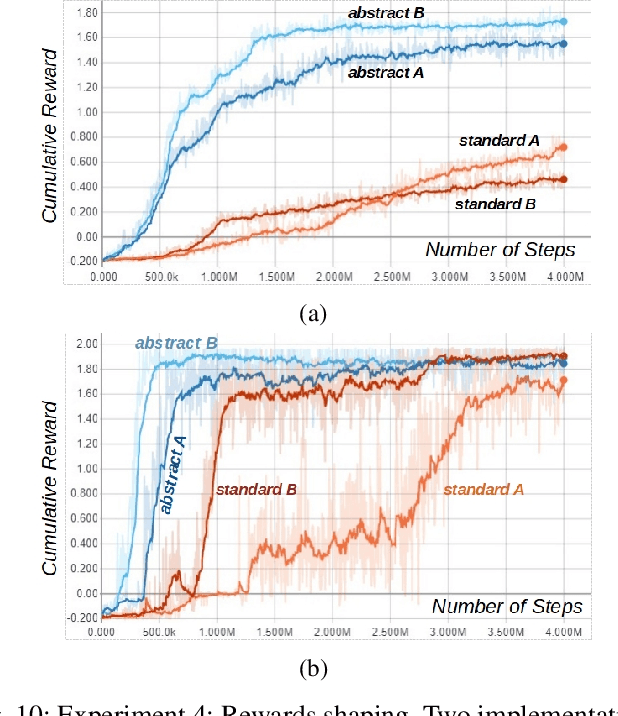
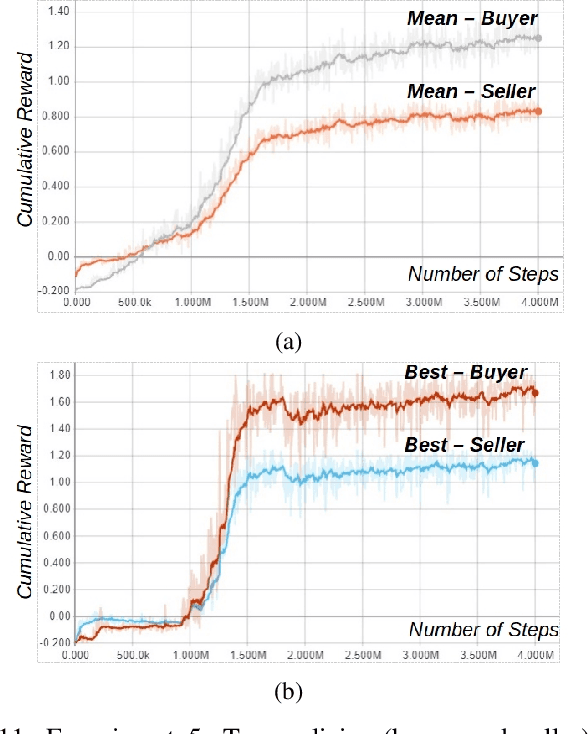
Future robots should follow human social norms in order to be useful and accepted in human society. In this paper, we leverage already existing social knowledge in human societies by capturing it in our framework through the notion of social norms. We show how norms can be used to guide a reinforcement learning agent towards achieving normative behavior and apply the same set of norms over different domains. Thus, we are able to: (1) provide a way to intuitively encode social knowledge (through norms); (2) guide learning towards normative behaviors (through an automatic norm reward system); and (3) achieve a transfer of learning by abstracting policies; Finally, (4) the method is not dependent on a particular RL algorithm. We show how our approach can be seen as a means to achieve abstract representation and learn procedural knowledge based on the declarative semantics of norms and discuss possible implications of this in some areas of cognitive science.
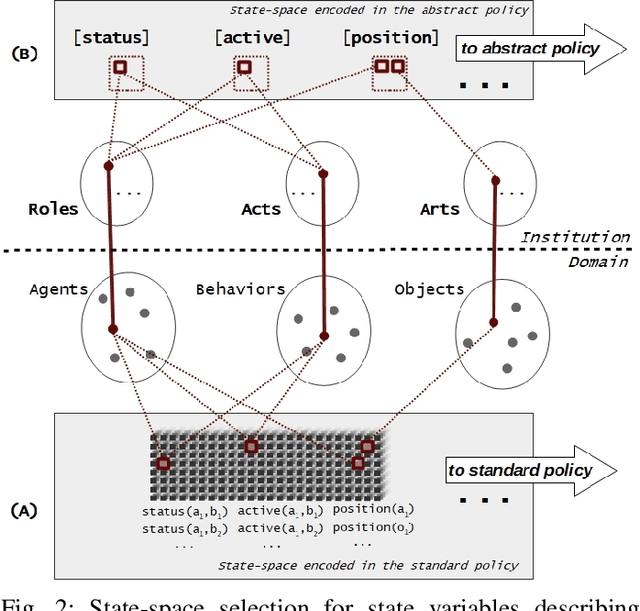
Norms, Institutions, and Robots
Jul 30, 2018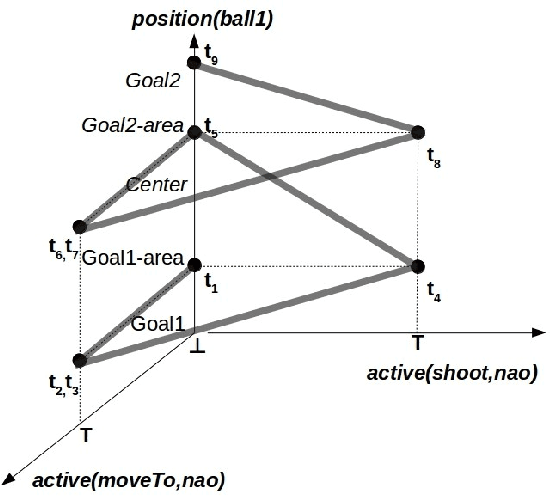

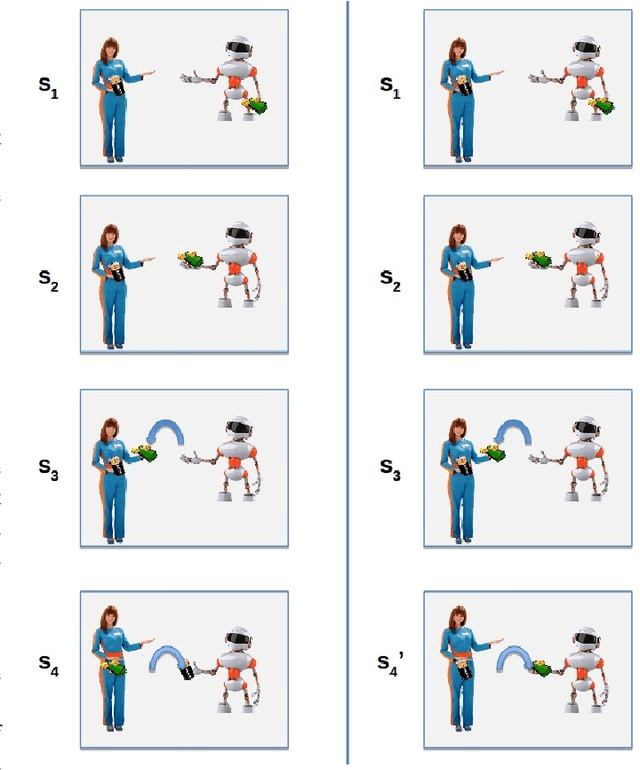
Interactions within human societies are usually regulated by social norms. If robots are to be accepted into human society, it is essential that they are aware of and capable of reasoning about social norms. In this paper, we focus on how to represent social norms in societies with humans and robots, and how artificial agents such as robots can reason about social norms in order to plan appropriate behavior. We use the notion of institution as a way to formally define and encapsulate norms. We provide a formal framework built around the notion of institution. The framework distinguishes between abstract norms and their semantics in a concrete domain, hence allowing the use of the same institution across physical domains and agent types. It also provides a formal computational framework for norm verification, planning, and plan execution in a domain.