 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobby is Not a Robber : On the Use of Institutions for Learning Normative Behavior
Aug 01, 2019
Future robots should follow human social norms in order to be useful and accepted in human society. In this paper, we leverage already existing social knowledge in human societies by capturing it in our framework through the notion of social norms. We show how norms can be used to guide a reinforcement learning agent towards achieving normative behavior and apply the same set of norms over different domains. Thus, we are able to: (1) provide a way to intuitively encode social knowledge (through norms); (2) guide learning towards normative behaviors (through an automatic norm reward system); and (3) achieve a transfer of learning by abstracting policies; Finally, (4) the method is not dependent on a particular RL algorithm. We show how our approach can be seen as a means to achieve abstract representation and learn procedural knowledge based on the declarative semantics of norms and discuss possible implications of this in some areas of cognitive science.
Norms, Institutions, and Robots
Jul 30, 2018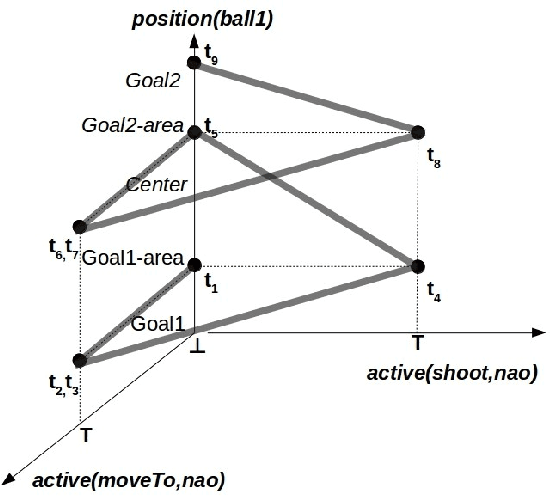

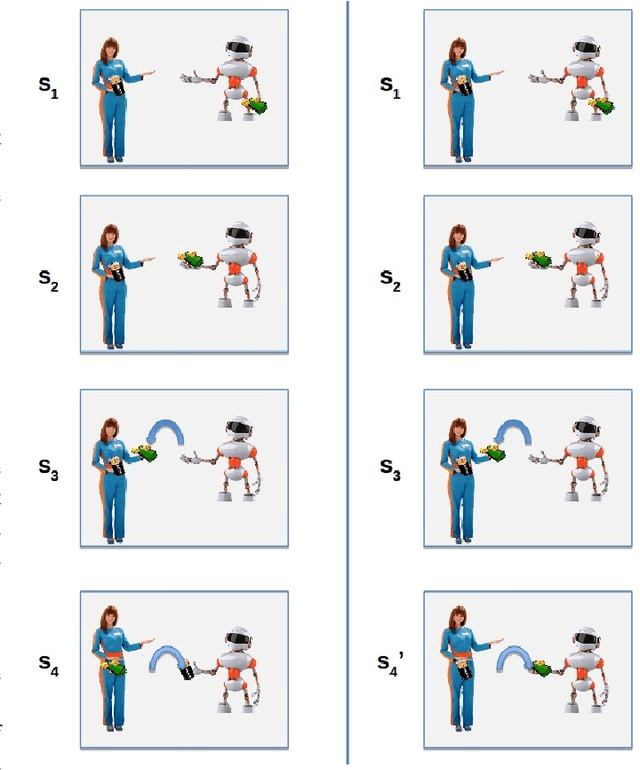
Interactions within human societies are usually regulated by social norms. If robots are to be accepted into human society, it is essential that they are aware of and capable of reasoning about social norms. In this paper, we focus on how to represent social norms in societies with humans and robots, and how artificial agents such as robots can reason about social norms in order to plan appropriate behavior. We use the notion of institution as a way to formally define and encapsulate norms. We provide a formal framework built around the notion of institution. The framework distinguishes between abstract norms and their semantics in a concrete domain, hence allowing the use of the same institution across physical domains and agent types. It also provides a formal computational framework for norm verification, planning, and plan execution in a domain.