 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Natural Language and ASP: A Hybrid Approach Using LLMs and AMR Parsing
Nov 11, 2025Answer Set Programming (ASP) is a declarative programming paradigm based on logic programming and non-monotonic reasoning. It is a tremendously powerful tool for describing and solving combinatorial problems. Like any other language, ASP requires users to learn how it works and the syntax involved. It is becoming increasingly required for those unfamiliar with programming languages to interact with code. This paper proposes a novel method of translating unconstrained English into ASP programs for logic puzzles using an LLM and Abstract Meaning Representation (AMR) graphs. Everything from ASP rules, facts, and constraints is generated to fully represent and solve the desired problem. Example logic puzzles are used to demonstrate the capabilities of the system. While most current methods rely entirely on an LLM, our system minimizes the role of the LLM only to complete straightforward tasks. The LLM is used to simplify natural language sentences, identify keywords, and generate simple facts. The AMR graphs are then parsed from simplified language and used to generate ASP constraints systematically. The system successfully creates an entire ASP program that solves a combinatorial logic problem. This approach is a significant first step in creating a lighter-weight, explainable system that converts natural language to solve complex logic problems.
Public Acceptance of Cybernetic Avatars in the service sector: Evidence from a Large-Scale Survey in Dubai
Jun 17, 2025Cybernetic avatars are hybrid interaction robots or digital representations that combine autonomous capabilities with teleoperated control. This study investigates the acceptance of cybernetic avatars in the highly multicultural society of Dubai, with particular emphasis on robotic avatars for customer service. Specifically, we explore how acceptance varies as a function of robot appearance (e.g., android, robotic-looking, cartoonish), deployment settings (e.g., shopping malls, hotels, hospitals), and functional tasks (e.g., providing information, patrolling). To this end, we conducted a large-scale survey with over 1,000 participants. Overall, cybernetic avatars received a high level of acceptance, with physical robot avatars receiving higher acceptance than digital avatars. In terms of appearance, robot avatars with a highly anthropomorphic robotic appearance were the most accepted, followed by cartoonish designs and androids. Animal-like appearances received the lowest level of acceptance. Among the tasks, providing information and guidance was rated as the most valued. Shopping malls, airports, public transport stations, and museums were the settings with the highest acceptance, whereas healthcare-related spaces received lower levels of support. An analysis by community cluster revealed among others that Emirati respondents showed significantly greater acceptance of android appearances compared to the overall sample, while participants from the 'Other Asia' cluster were significantly more accepting of cartoonish appearances. Our study underscores the importance of incorporating citizen feedback into the design and deployment of cybernetic avatars from the early stages to enhance acceptance of this technology in society.
A Multi-Modal Interaction Framework for Efficient Human-Robot Collaborative Shelf Picking
Apr 09, 2025



The growing presence of service robots in human-centric environments, such as warehouses, demands seamless and intuitive human-robot collaboration. In this paper, we propose a collaborative shelf-picking framework that combines multimodal interaction, physics-based reasoning, and task division for enhanced human-robot teamwork. The framework enables the robot to recognize human pointing gestures, interpret verbal cues and voice commands, and communicate through visual and auditory feedback. Moreover, it is powered by a Large Language Model (LLM) which utilizes Chain of Thought (CoT) and a physics-based simulation engine for safely retrieving cluttered stacks of boxes on shelves, relationship graph for sub-task generation, extraction sequence planning and decision making. Furthermore, we validate the framework through real-world shelf picking experiments such as 1) Gesture-Guided Box Extraction, 2) Collaborative Shelf Clearing and 3) Collaborative Stability Assistance.
A Reconfigurable Low Power High Throughput Architecture for Deep Network Training
Jun 15, 2016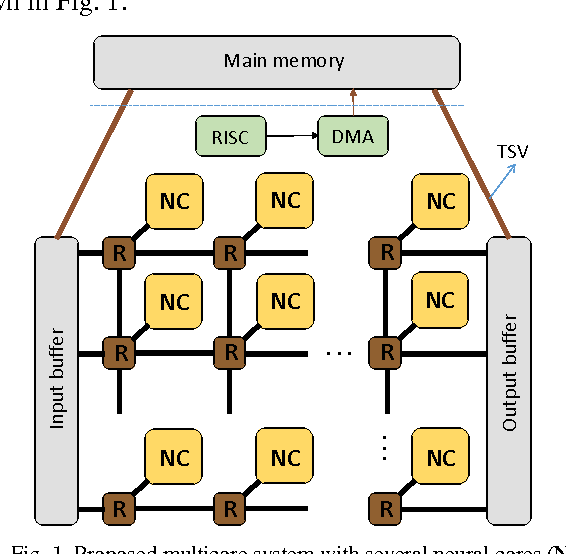

General purpose computing systems are used for a large variety of applications. Extensive supports for flexibility in these systems limit their energy efficiencies. Neural networks, including deep networks, are widely used for signal processing and pattern recognition applications. In this paper we propose a multicore architecture for deep neural network based processing. Memristor crossbars are utilized to provide low power high throughput execution of neural networks. The system has both training and recognition (evaluation of new input) capabilities. The proposed system could be used for classification, dimensionality reduction, feature extraction, and anomaly detection applications. The system level area and power benefits of the specialized architecture is compared with the NVIDIA Telsa K20 GPGPU. Our experimental evaluations show that the proposed architecture can provide up to five orders of magnitude more energy efficiency over GPGPUs for deep neural network processing.