 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypothesis on the Functional Advantages of the Selection-Broadcast Cycle Structure: Global Workspace Theory and Dealing with a Real-Time World
May 20, 2025This paper discusses the functional advantages of the Selection-Broadcast Cycle structure proposed by Global Workspace Theory (GWT), inspired by human consciousness, particularly focusing on its applicability to artificial intelligence and robotics in dynamic, real-time scenarios. While previous studies often examined the Selection and Broadcast processes independently, this research emphasizes their combined cyclic structure and the resulting benefits for real-time cognitive systems. Specifically, the paper identifies three primary benefits: Dynamic Thinking Adaptation, Experience-Based Adaptation, and Immediate Real-Time Adaptation. This work highlights GWT's potential as a cognitive architecture suitable for sophisticated decision-making and adaptive performance in unsupervised, dynamic environments. It suggests new directions for the development and implementation of robust, general-purpose AI and robotics systems capable of managing complex, real-world tasks.
Service Robots in a Bakery Shop: A Field Study
Aug 19, 2022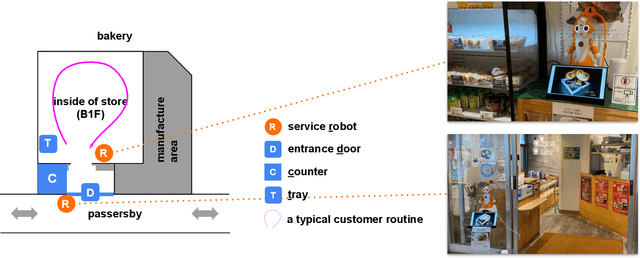
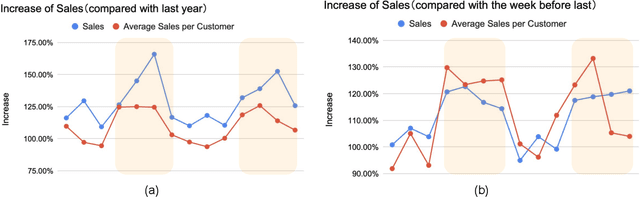
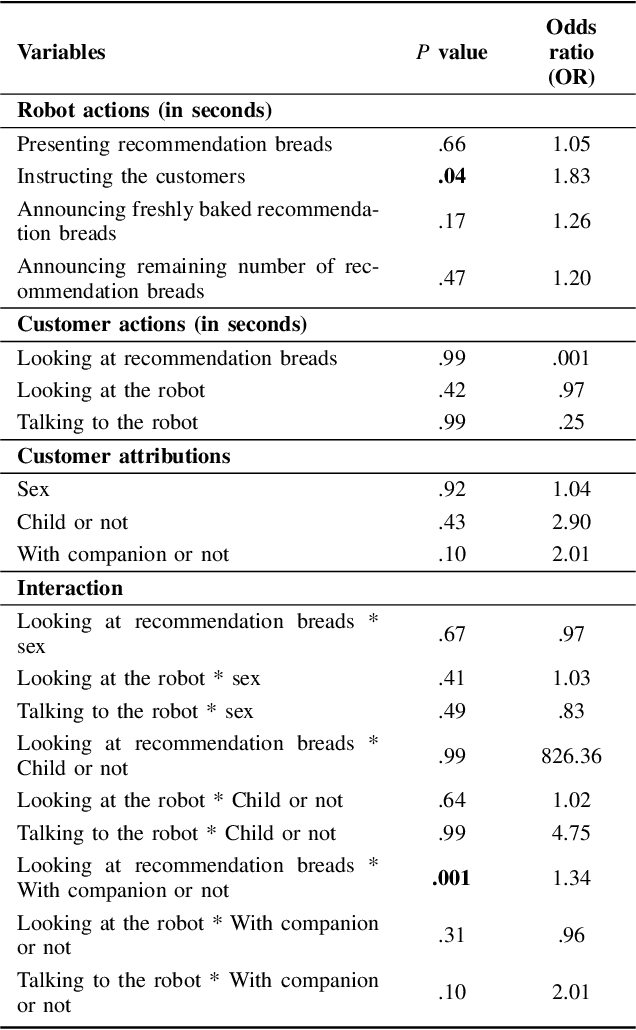
In this paper, we report on a field study in which we employed two service robots in a bakery store as a sales promotion. Previous studies have explored public applications of service robots public such as shopping malls. However, more evidence is needed that service robots can contribute to sales in real stores. Moreover, the behaviors of customers and service robots in the context of sales promotions have not been examined well. Hence, the types of robot behavior that can be considered effective and the customers' responses to these robots remain unclear. To address these issues, we installed two tele-operated service robots in a bakery store for nearly 2 weeks, one at the entrance as a greeter and the other one inside the store to recommend products. The results show a dramatic increase in sales during the days when the robots were applied. Furthermore, we annotated the video recordings of both the robots' and customers' behavior. We found that although the robot placed at the entrance successfully attracted the interest of the passersby, no apparent increase in the number of customers visiting the store was observed. However, we confirmed that the recommendations of the robot operating inside the store did have a positive impact. We discuss our findings in detail and provide both theoretical and practical recommendations for future research and applications.
An Estimation Framework for Passerby Engagement Interacting with Social Robots
Jun 06, 2022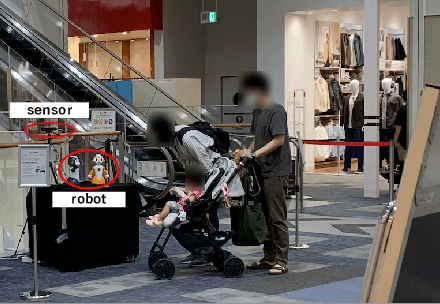
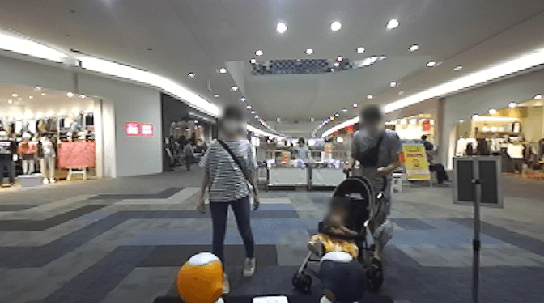
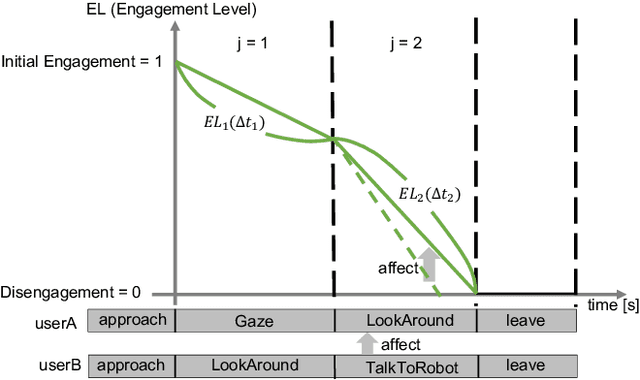
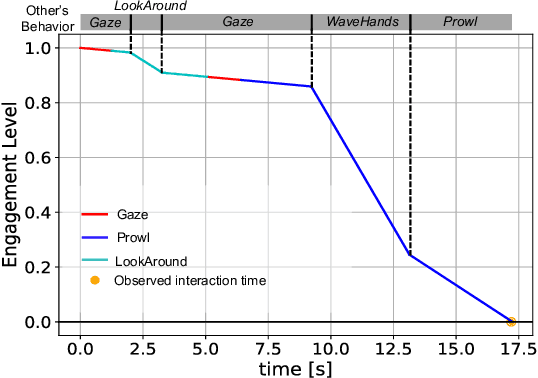
Social robots are expected to be a human labor support technology, and one application of them is an advertising medium in public spaces. When social robots provide information, such as recommended shops, adaptive communication according to the user's state is desired. User engagement, which is also defined as the level of interest in the robot, is likely to play an important role in adaptive communication. Therefore, in this paper, we propose a new framework to estimate user engagement. The proposed method focuses on four unsolved open problems: multi-party interactions, process of state change in engagement, difficulty in annotating engagement, and interaction dataset in the real world. The accuracy of the proposed method for estimating engagement was evaluated using interaction duration. The results show that the interaction duration can be accurately estimated by considering the influence of the behaviors of other people; this also implies that the proposed model accurately estimates the level of engagement during interaction with the robot.
Behavioral assessment of a humanoid robot when attracting pedestrians in a mall
Sep 06, 2021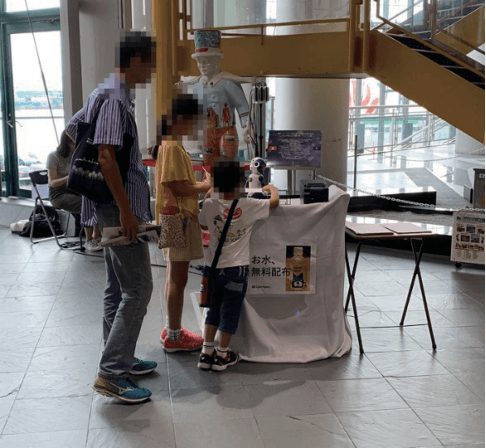

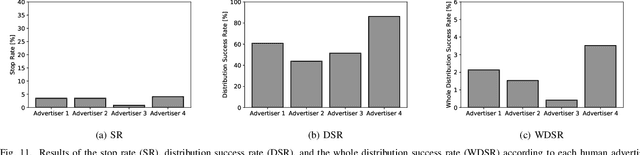
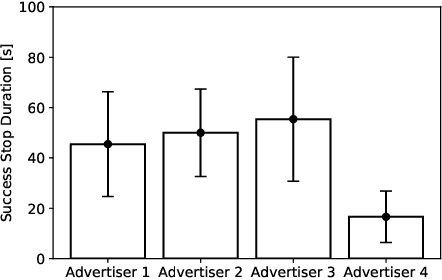
Research currently being conducted on the use of robots as human labor support technology. In particular, the service industry needs to allocate more manpower, and it will be important for robots to support people. This study focuses on using a humanoid robot as a social service robot to convey information in a shopping mall, and the robot's behavioral concepts were analyzed. In order to convey the information, two processes must occur. Pedestrians must stop in front of the robot, and the robot must continue the engagement with them. For the purpose of this study, three types of autonomous behavioral concepts of the robot for the general use were analyzed and compared in these processes in the experiment: active, passive-negative, and passive-positive concepts. After interactions were attempted with 65,000+ pedestrians, this study revealed that the passive-negative concept can make pedestrians stop more and stay longer. In order to evaluate the effectiveness of the robot in a real environment, the comparative results between three behaviors and human advertisers revealed that (1) the results of the active and passive-positive concepts of the robot are comparable to those of the humans, and (2) the performance of the passive-negative concept is higher than that of all participants. These findings demonstrate that the performance of robots is comparable to that of humans in providing information tasks in a limited environment; therefore, it is expected that service robots as a labor support technology will be able to perform well in the real world.
3D Head-Position Prediction in First-Person View by Considering Head Pose for Human-Robot Eye Contact
Mar 11, 2021
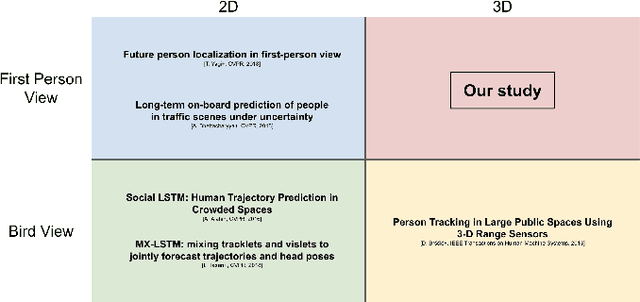
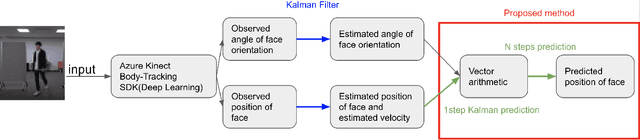

For a humanoid robot to make eye contact to initiate communication with a human, it is necessary to estimate the human's head position.However, eye contact becomes difficult due to the mechanical delay of the robot while the subject with whom the robot is interacting with is moving. Owing to these issues, it is important to perform head-position prediction to mitigate the effect of the delay in the robot's motion. Based on the fact that humans turn their heads before changing direction while walking, we hypothesized that the accuracy of three-dimensional(3D) head-position prediction from the first-person view can be improved by considering the head pose into account.We compared our method with the conventional Kalman filter-based method, and found our method to be more accurate. The experimental results show that considering the head pose helps improve the accuracy of 3D head-position prediction.