 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Metrics to Meaning: Insights from a Mixed-Methods Field Experiment on Retail Robot Deployment
Jan 05, 2026We report a mixed-methods field experiment of a conversational service robot deployed under everyday staffing discretion in a live bedding store. Over 12 days we alternated three conditions--Baseline (no robot), Robot-only, and Robot+Fixture--and video-annotated the service funnel from passersby to purchase. An explanatory sequential design then used six post-experiment staff interviews to interpret the quantitative patterns. Quantitatively, the robot increased stopping per passerby (highest with the fixture), yet clerk-led downstream steps per stopper--clerk approach, store entry, assisted experience, and purchase--decreased. Interviews explained this divergence: clerks avoided interrupting ongoing robot-customer talk, struggled with ambiguous timing amid conversational latency, and noted child-centered attraction that often satisfied curiosity at the doorway. The fixture amplified visibility but also anchored encounters at the threshold, creating a well-defined micro-space where needs could ``close'' without moving inside. We synthesize these strands into an integrative account from the initial show of interest on the part of a customer to their entering the store and derive actionable guidance. The results advance the understanding of interactions between customers, staff members, and the robot and offer practical recommendations for deploying service robots in high-touch retail.
What you reward is what you learn: Comparing rewards for online speech policy optimization in public HRI
Jan 05, 2026Designing policies that are both efficient and acceptable for conversational service robots in open and diverse environments is non-trivial. Unlike fixed, hand-tuned parameters, online learning can adapt to non-stationary conditions. In this paper, we study how to adapt a social robot's speech policy in the wild. During a 12-day in-situ deployment with over 1,400 public encounters, we cast online policy optimization as a multi-armed bandit problem and use Thompson sampling to select among six actions defined by speech rate (slow/normal/fast) and verbosity (concise/detailed). We compare three complementary binary rewards--Ru (user rating), Rc (conversation closure), and Rt (>=2 turns)--and show that each induces distinct arm distributions and interaction behaviors. We complement the online results with offline evaluations that analyze contextual factors (e.g., crowd level, group size) using video-annotated data. Taken together, we distill ready-to-use design lessons for deploying online optimization of speech policies in real public HRI settings.
A Noise-Robust Turn-Taking System for Real-World Dialogue Robots: A Field Experiment
Mar 08, 2025Turn-taking is a crucial aspect of human-robot interaction, directly influencing conversational fluidity and user engagement. While previous research has explored turn-taking models in controlled environments, their robustness in real-world settings remains underexplored. In this study, we propose a noise-robust voice activity projection (VAP) model, based on a Transformer architecture, to enhance real-time turn-taking in dialogue robots. To evaluate the effectiveness of the proposed system, we conducted a field experiment in a shopping mall, comparing the VAP system with a conventional cloud-based speech recognition system. Our analysis covered both subjective user evaluations and objective behavioral analysis. The results showed that the proposed system significantly reduced response latency, leading to a more natural conversation where both the robot and users responded faster. The subjective evaluations suggested that faster responses contribute to a better interaction experience.
What Drives You to Interact?: The Role of User Motivation for a Robot in the Wild
Jan 09, 2025



In this paper, we aim to understand how user motivation shapes human-robot interaction (HRI) in the wild. To explore this, we conducted a field study by deploying a fully autonomous conversational robot in a shopping mall over two days. Through sequential video analysis, we identified five patterns of interaction fluency (Smooth, Awkward, Active, Messy, and Quiet), four types of user motivation for interacting with the robot (Function, Experiment, Curiosity, and Education), and user positioning towards the robot. We further analyzed how these motivations and positioning influence interaction fluency. Our findings suggest that incorporating users' motivation types into the design of robot behavior can enhance interaction fluency, engagement, and user satisfaction in real-world HRI scenarios.
Influence of collaborative customer service by service robots and clerks in bakery stores
Dec 20, 2022



In recent years, various service robots have been introduced in stores as recommendation systems. Previous studies attempted to increase the influence of these robots by improving their social acceptance and trust. However, when such service robots recommend a product to customers in real environments, the effect on the customers is influenced not only by the robot itself, but also by the social influence of the surrounding people such as store clerks. Therefore, leveraging the social influence of the clerks may increase the influence of the robots on the customers. Hence, we compared the influence of robots with and without collaborative customer service between the robots and clerks in two bakery stores. The experimental results showed that collaborative customer service increased the purchase rate of the recommended bread and improved the impression regarding the robot and store experience of the customers. Because the results also showed that the workload required for the clerks to collaborate with the robot was not high, this study suggests that all stores with service robots may show high effectiveness in introducing collaborative customer service.
An Estimation Framework for Passerby Engagement Interacting with Social Robots
Jun 06, 2022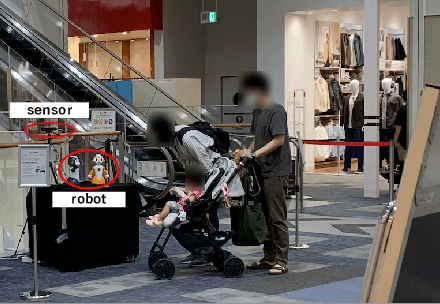
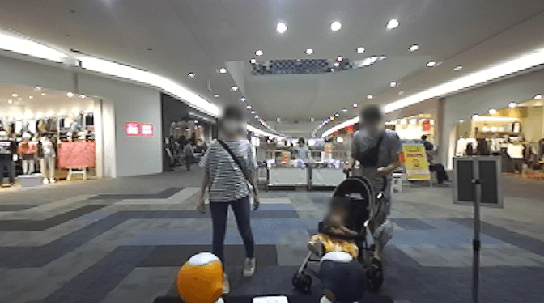
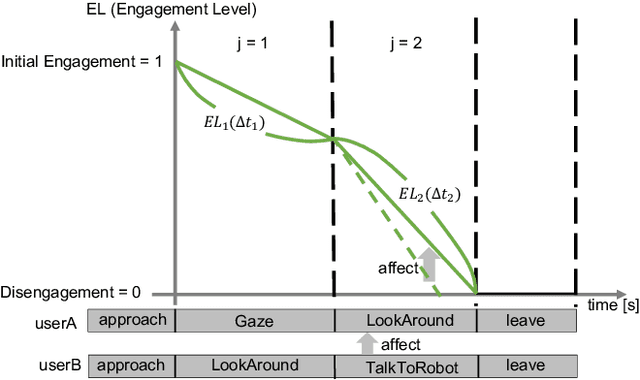
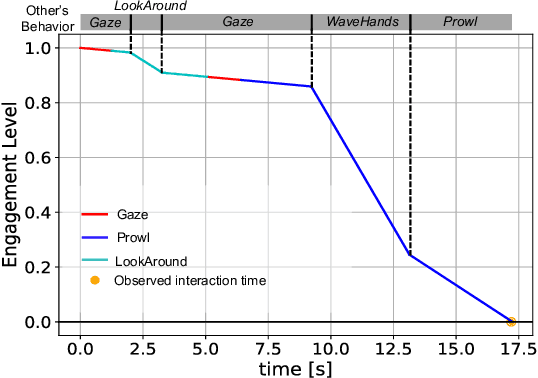
Social robots are expected to be a human labor support technology, and one application of them is an advertising medium in public spaces. When social robots provide information, such as recommended shops, adaptive communication according to the user's state is desired. User engagement, which is also defined as the level of interest in the robot, is likely to play an important role in adaptive communication. Therefore, in this paper, we propose a new framework to estimate user engagement. The proposed method focuses on four unsolved open problems: multi-party interactions, process of state change in engagement, difficulty in annotating engagement, and interaction dataset in the real world. The accuracy of the proposed method for estimating engagement was evaluated using interaction duration. The results show that the interaction duration can be accurately estimated by considering the influence of the behaviors of other people; this also implies that the proposed model accurately estimates the level of engagement during interaction with the robot.
Behavioral assessment of a humanoid robot when attracting pedestrians in a mall
Sep 06, 2021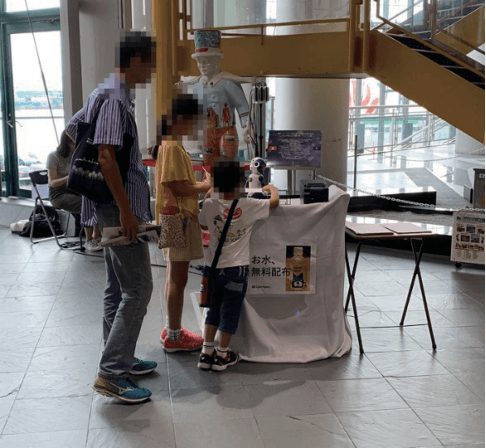

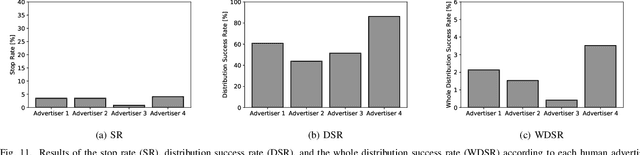
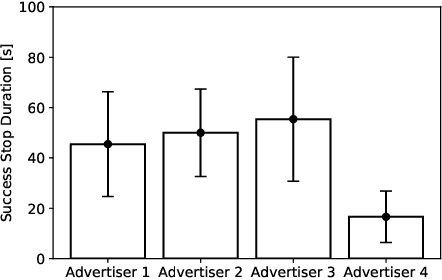
Research currently being conducted on the use of robots as human labor support technology. In particular, the service industry needs to allocate more manpower, and it will be important for robots to support people. This study focuses on using a humanoid robot as a social service robot to convey information in a shopping mall, and the robot's behavioral concepts were analyzed. In order to convey the information, two processes must occur. Pedestrians must stop in front of the robot, and the robot must continue the engagement with them. For the purpose of this study, three types of autonomous behavioral concepts of the robot for the general use were analyzed and compared in these processes in the experiment: active, passive-negative, and passive-positive concepts. After interactions were attempted with 65,000+ pedestrians, this study revealed that the passive-negative concept can make pedestrians stop more and stay longer. In order to evaluate the effectiveness of the robot in a real environment, the comparative results between three behaviors and human advertisers revealed that (1) the results of the active and passive-positive concepts of the robot are comparable to those of the humans, and (2) the performance of the passive-negative concept is higher than that of all participants. These findings demonstrate that the performance of robots is comparable to that of humans in providing information tasks in a limited environment; therefore, it is expected that service robots as a labor support technology will be able to perform well in the real world.
3D Head-Position Prediction in First-Person View by Considering Head Pose for Human-Robot Eye Contact
Mar 11, 2021
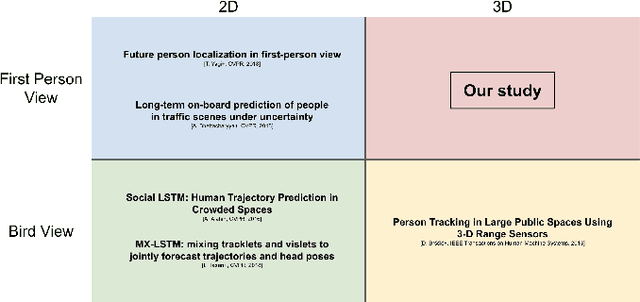
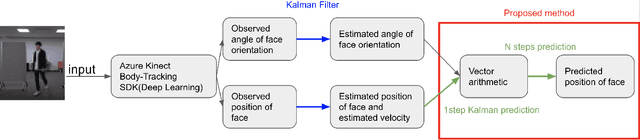

For a humanoid robot to make eye contact to initiate communication with a human, it is necessary to estimate the human's head position.However, eye contact becomes difficult due to the mechanical delay of the robot while the subject with whom the robot is interacting with is moving. Owing to these issues, it is important to perform head-position prediction to mitigate the effect of the delay in the robot's motion. Based on the fact that humans turn their heads before changing direction while walking, we hypothesized that the accuracy of three-dimensional(3D) head-position prediction from the first-person view can be improved by considering the head pose into account.We compared our method with the conventional Kalman filter-based method, and found our method to be more accurate. The experimental results show that considering the head pose helps improve the accuracy of 3D head-position prediction.