 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavioral assessment of a humanoid robot when attracting pedestrians in a mall
Paper and Code
Sep 06, 2021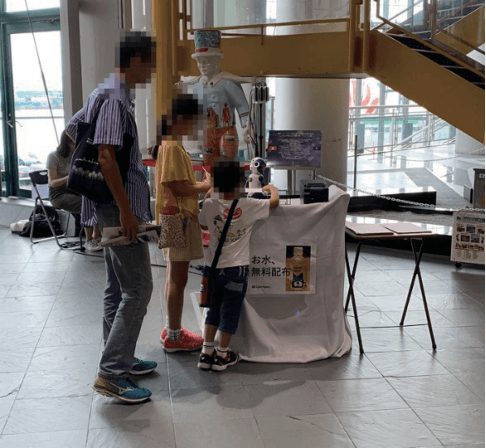

Research currently being conducted on the use of robots as human labor support technology. In particular, the service industry needs to allocate more manpower, and it will be important for robots to support people. This study focuses on using a humanoid robot as a social service robot to convey information in a shopping mall, and the robot's behavioral concepts were analyzed. In order to convey the information, two processes must occur. Pedestrians must stop in front of the robot, and the robot must continue the engagement with them. For the purpose of this study, three types of autonomous behavioral concepts of the robot for the general use were analyzed and compared in these processes in the experiment: active, passive-negative, and passive-positive concepts. After interactions were attempted with 65,000+ pedestrians, this study revealed that the passive-negative concept can make pedestrians stop more and stay longer. In order to evaluate the effectiveness of the robot in a real environment, the comparative results between three behaviors and human advertisers revealed that (1) the results of the active and passive-positive concepts of the robot are comparable to those of the humans, and (2) the performance of the passive-negative concept is higher than that of all participants. These findings demonstrate that the performance of robots is comparable to that of humans in providing information tasks in a limited environment; therefore, it is expected that service robots as a labor support technology will be able to perform well in the real world.