 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavioral assessment of a humanoid robot when attracting pedestrians in a mall
Sep 06, 2021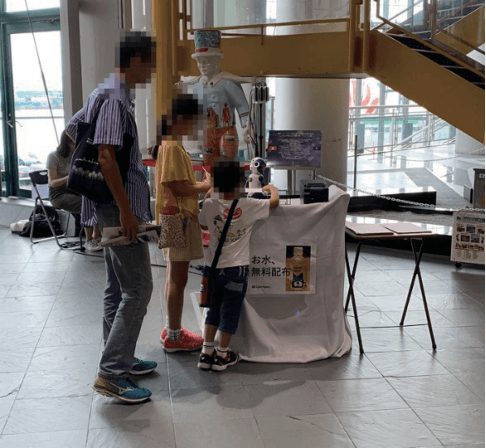

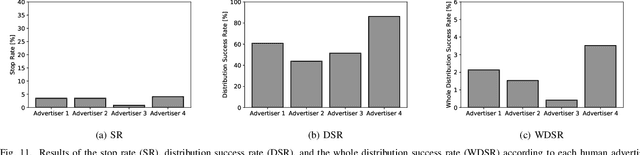
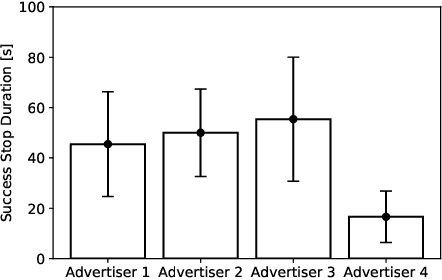
Research currently being conducted on the use of robots as human labor support technology. In particular, the service industry needs to allocate more manpower, and it will be important for robots to support people. This study focuses on using a humanoid robot as a social service robot to convey information in a shopping mall, and the robot's behavioral concepts were analyzed. In order to convey the information, two processes must occur. Pedestrians must stop in front of the robot, and the robot must continue the engagement with them. For the purpose of this study, three types of autonomous behavioral concepts of the robot for the general use were analyzed and compared in these processes in the experiment: active, passive-negative, and passive-positive concepts. After interactions were attempted with 65,000+ pedestrians, this study revealed that the passive-negative concept can make pedestrians stop more and stay longer. In order to evaluate the effectiveness of the robot in a real environment, the comparative results between three behaviors and human advertisers revealed that (1) the results of the active and passive-positive concepts of the robot are comparable to those of the humans, and (2) the performance of the passive-negative concept is higher than that of all participants. These findings demonstrate that the performance of robots is comparable to that of humans in providing information tasks in a limited environment; therefore, it is expected that service robots as a labor support technology will be able to perform well in the real world.
3D Head-Position Prediction in First-Person View by Considering Head Pose for Human-Robot Eye Contact
Mar 11, 2021
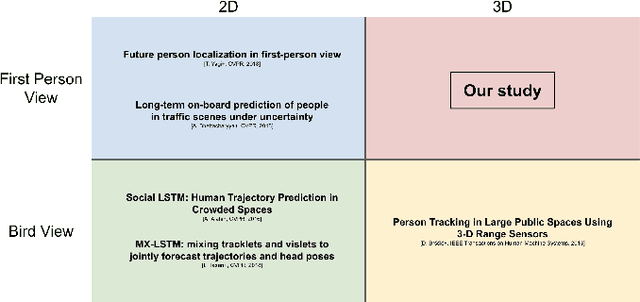
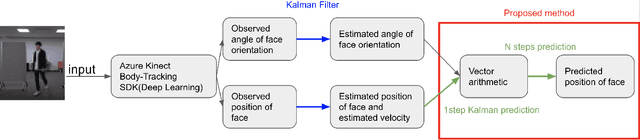

For a humanoid robot to make eye contact to initiate communication with a human, it is necessary to estimate the human's head position.However, eye contact becomes difficult due to the mechanical delay of the robot while the subject with whom the robot is interacting with is moving. Owing to these issues, it is important to perform head-position prediction to mitigate the effect of the delay in the robot's motion. Based on the fact that humans turn their heads before changing direction while walking, we hypothesized that the accuracy of three-dimensional(3D) head-position prediction from the first-person view can be improved by considering the head pose into account.We compared our method with the conventional Kalman filter-based method, and found our method to be more accurate. The experimental results show that considering the head pose helps improve the accuracy of 3D head-position prediction.
Can Robot Attract Passersby without Causing Discomfort by User-Centered Reinforcement Learning?
Mar 14, 2019
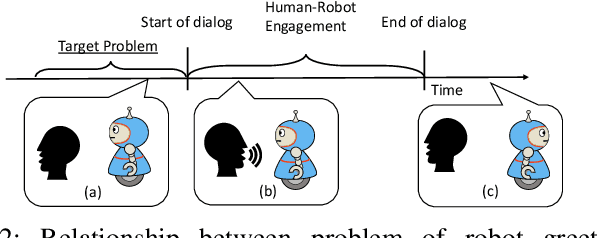
The aim of our study was to develop a method by which a social robot can greet passersby and get their attention without causing them to suffer discomfort.A number of customer services have recently come to be provided by social robots rather than people, including, serving as receptionists, guides, and exhibitors. Robot exhibitors, for example, can explain products being promoted by the robot owners. However, a sudden greeting by a robot can startle passersby and cause discomfort to passersby.Social robots should thus adapt their mannerisms to the situation they face regarding passersby.We developed a method for meeting this requirement on the basis of the results of related work. Our proposed method, user-centered reinforcement learning, enables robots to greet passersby and get their attention without causing them to suffer discomfort (p<0.01) .The results of an experiment in the field, an office entrance, demonstrated that our method meets this requirement.