 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Robot Attract Passersby without Causing Discomfort by User-Centered Reinforcement Learning?
Paper and Code
Mar 14, 2019
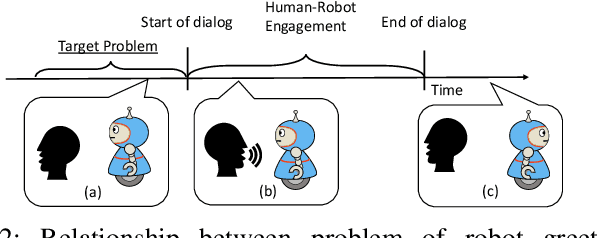
The aim of our study was to develop a method by which a social robot can greet passersby and get their attention without causing them to suffer discomfort.A number of customer services have recently come to be provided by social robots rather than people, including, serving as receptionists, guides, and exhibitors. Robot exhibitors, for example, can explain products being promoted by the robot owners. However, a sudden greeting by a robot can startle passersby and cause discomfort to passersby.Social robots should thus adapt their mannerisms to the situation they face regarding passersby.We developed a method for meeting this requirement on the basis of the results of related work. Our proposed method, user-centered reinforcement learning, enables robots to greet passersby and get their attention without causing them to suffer discomfort (p<0.01) .The results of an experiment in the field, an office entrance, demonstrated that our method meets this requirement.