 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Head-Position Prediction in First-Person View by Considering Head Pose for Human-Robot Eye Contact
Paper and Code
Mar 11, 2021
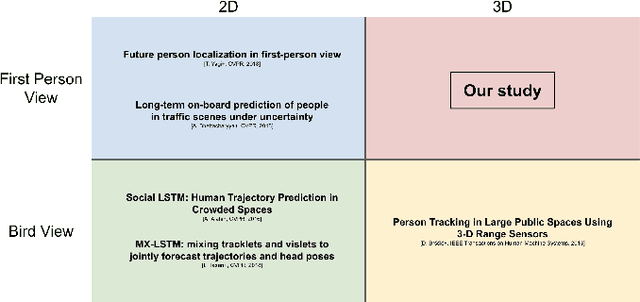
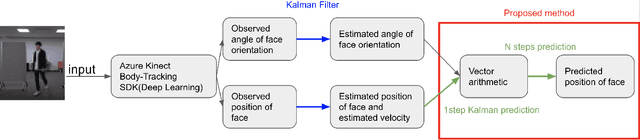

For a humanoid robot to make eye contact to initiate communication with a human, it is necessary to estimate the human's head position.However, eye contact becomes difficult due to the mechanical delay of the robot while the subject with whom the robot is interacting with is moving. Owing to these issues, it is important to perform head-position prediction to mitigate the effect of the delay in the robot's motion. Based on the fact that humans turn their heads before changing direction while walking, we hypothesized that the accuracy of three-dimensional(3D) head-position prediction from the first-person view can be improved by considering the head pose into account.We compared our method with the conventional Kalman filter-based method, and found our method to be more accurate. The experimental results show that considering the head pose helps improve the accuracy of 3D head-position prediction.