 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and use of devices to assist movement of the upper limb: review of the literature
Apr 09, 2025This article explores assistive devices for upper limb movement in people with disabilities through a systematic review based on the PRISMA methodology. The studied devices encompass technologies ranging from orthoses to advanced robotics, aiming to compensate for or supplement motor impairments. The results highlight the diversity of applications (rehabilitation, daily living activities), targeted body segments (distal, proximal, or global), as well as control mechanisms and interfaces used. However, despite the variety of promising prototypes, few devices are commercially available, limiting their real impact on end users. Existing technologies, while effective in improving functional autonomy and quality of life, still face challenges in terms of ergonomics, cost, and portability. In conclusion, this article emphasizes the importance of a user-centered approach and proposes avenues for the development of innovative, modular, and accessible assistive devices.
* in French language
Wait for me! Towards socially assistive walk companions
Apr 18, 2019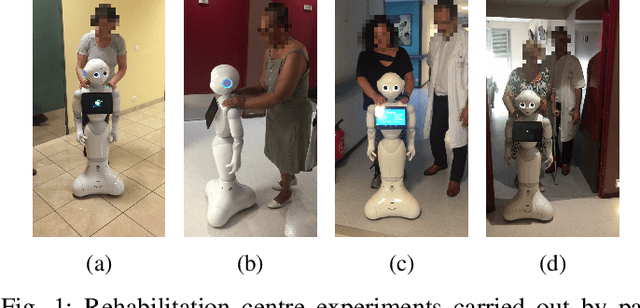
The aim of the present study involves designing a humanoid robot guide as a walking trainer for elderly and rehabilitation patients. The system is based on the humanoid robot Pepper with a compliance approach that allows to match the motion intention of the user to the robot's pace. This feasibility study is backed up by an experimental evaluation conducted in a rehabilitation centre. We hypothesize that Pepper robot used as an assistive partner, can also benefit elderly users by motivating them to perform physical activity.