 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActing and Planning with Hierarchical Operational Models on a Mobile Robot: A Study with RAE+UPOM
Jul 15, 2025Robotic task execution faces challenges due to the inconsistency between symbolic planner models and the rich control structures actually running on the robot. In this paper, we present the first physical deployment of an integrated actor-planner system that shares hierarchical operational models for both acting and planning, interleaving the Reactive Acting Engine (RAE) with an anytime UCT-like Monte Carlo planner (UPOM). We implement RAE+UPOM on a mobile manipulator in a real-world deployment for an object collection task. Our experiments demonstrate robust task execution under action failures and sensor noise, and provide empirical insights into the interleaved acting-and-planning decision making process.
FAPE: a Constraint-based Planner for Generative and Hierarchical Temporal Planning
Oct 25, 2020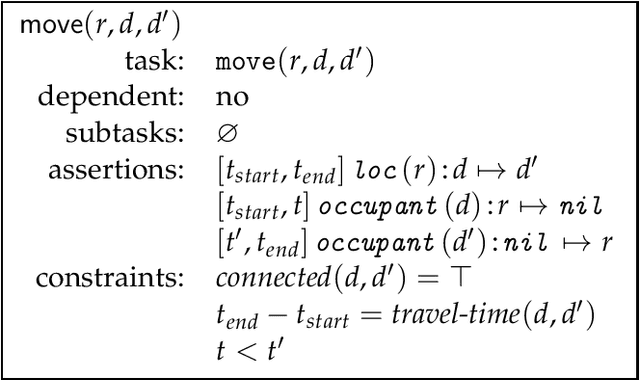
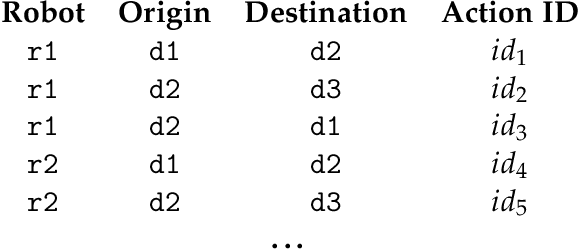
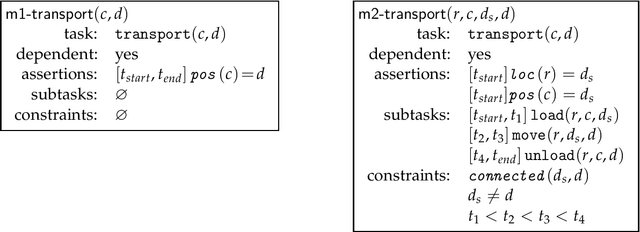
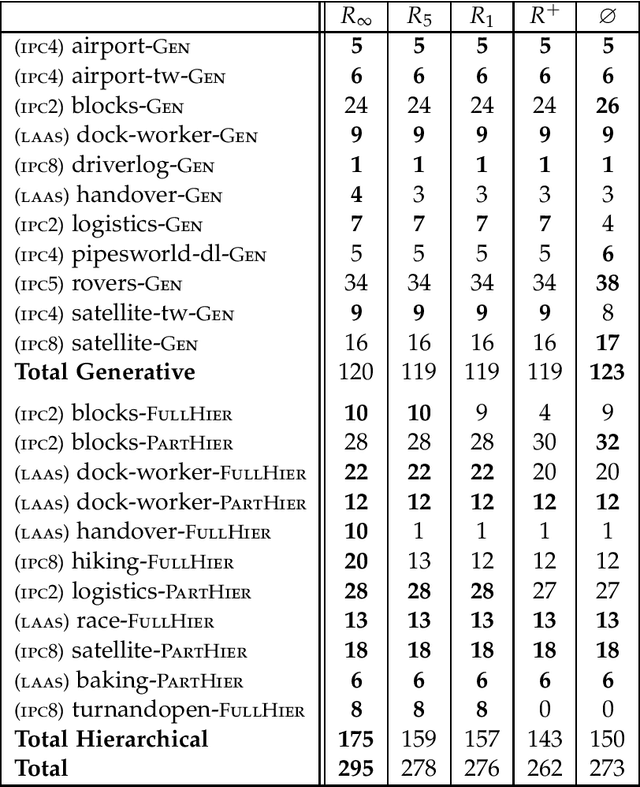
Temporal planning offers numerous advantages when based on an expressive representation. Timelines have been known to provide the required expressiveness but at the cost of search efficiency. We propose here a temporal planner, called FAPE, which supports many of the expressive temporal features of the ANML modeling language without loosing efficiency. FAPE's representation coherently integrates flexible timelines with hierarchical refinement methods that can provide efficient control knowledge. A novel reachability analysis technique is proposed and used to develop causal networks to constrain the search space. It is employed for the design of informed heuristics, inference methods and efficient search strategies. Experimental results on common benchmarks in the field permit to assess the components and search strategies of FAPE, and to compare it to IPC planners. The results show the proposed approach to be competitive with less expressive planners and often superior when hierarchical control knowledge is provided. FAPE, a freely available system, provides other features, not covered here, such as the integration of planning with acting, and the handling of sensing actions in partially observable environments.
Deliberative Acting, Online Planning and Learning with Hierarchical Operational Models
Oct 02, 2020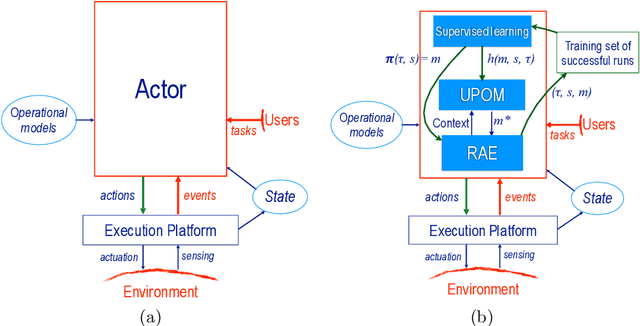
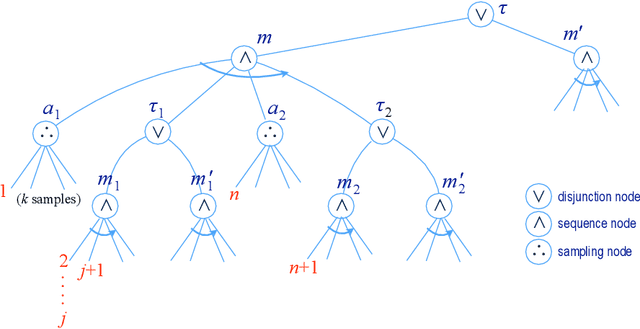

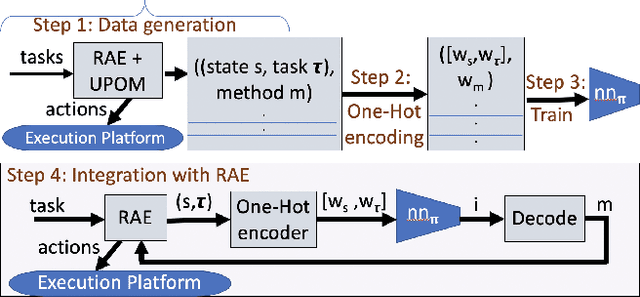
The most common representation formalisms for automated planning are descriptive models that abstractly describe what the actions do and are tailored for effciently computing the next state(s) in a state-transition system. However, real-world acting requires operational models that describe how to do things, with rich control structures for closed-loop online decision-making in a dynamic environment. To use a different action model for planning than the one used for acting causes problems with combining acting and planning, in particular for the development and consistency verification of the different models. As an alternative, we define and implement an integrated acting-and-planning system in which both planning and acting use the same operational models, which are written in a general-purpose hierarchical task-oriented language offering rich control structures. The acting component, called Reactive Acting Engine (RAE), is inspired by the well-known PRS system, except that instead of being purely reactive, it can get advice from the planner. Our planner uses a UCT-like Monte Carlo Tree Search procedure, called UPOM (UCT Procedure for Operational Models), whose rollouts are simulations of the actor's operational models. We also present learning strategies for use with RAE and UPOM that acquire, from online acting experiences and/or simulated planning results, a mapping from decision contexts to method instances as well as a heuristic function to guide UPOM. Our experimental results show that UPOM and our learning strategies significantly improve the acting efficiency and robustness of RAE. We discuss the asymptotic convergence of UPOM by mapping its search space to an MDP.
Integrating Acting, Planning and Learning in Hierarchical Operational Models
Mar 09, 2020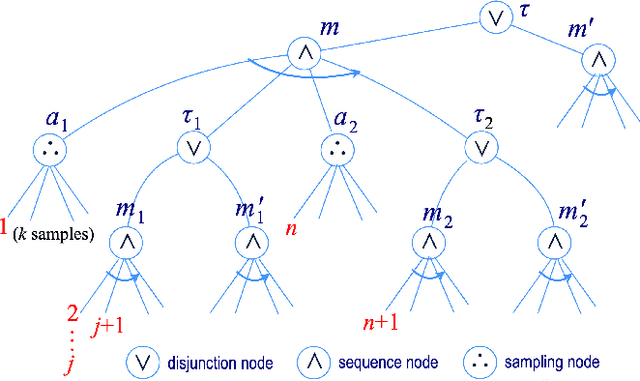
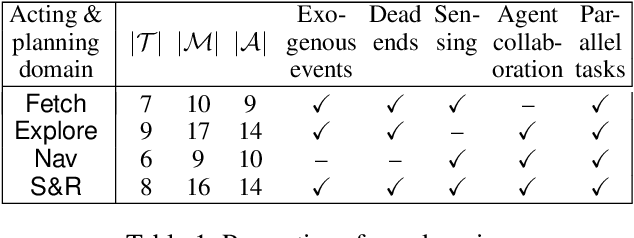

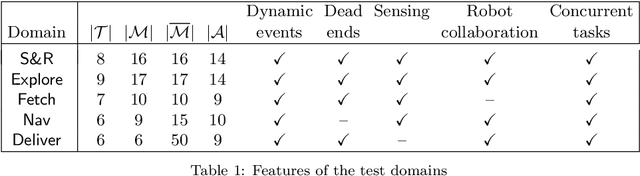
We present new planning and learning algorithms for RAE, the Refinement Acting Engine. RAE uses hierarchical operational models to perform tasks in dynamically changing environments. Our planning procedure, UPOM, does a UCT-like search in the space of operational models in order to find a near-optimal method to use for the task and context at hand. Our learning strategies acquire, from online acting experiences and/or simulated planning results, a mapping from decision contexts to method instances as well as a heuristic function to guide UPOM. Our experimental results show that UPOM and our learning strategies significantly improve RAE's performance in four test domains using two different metrics: efficiency and success ratio.